







































产品亮点
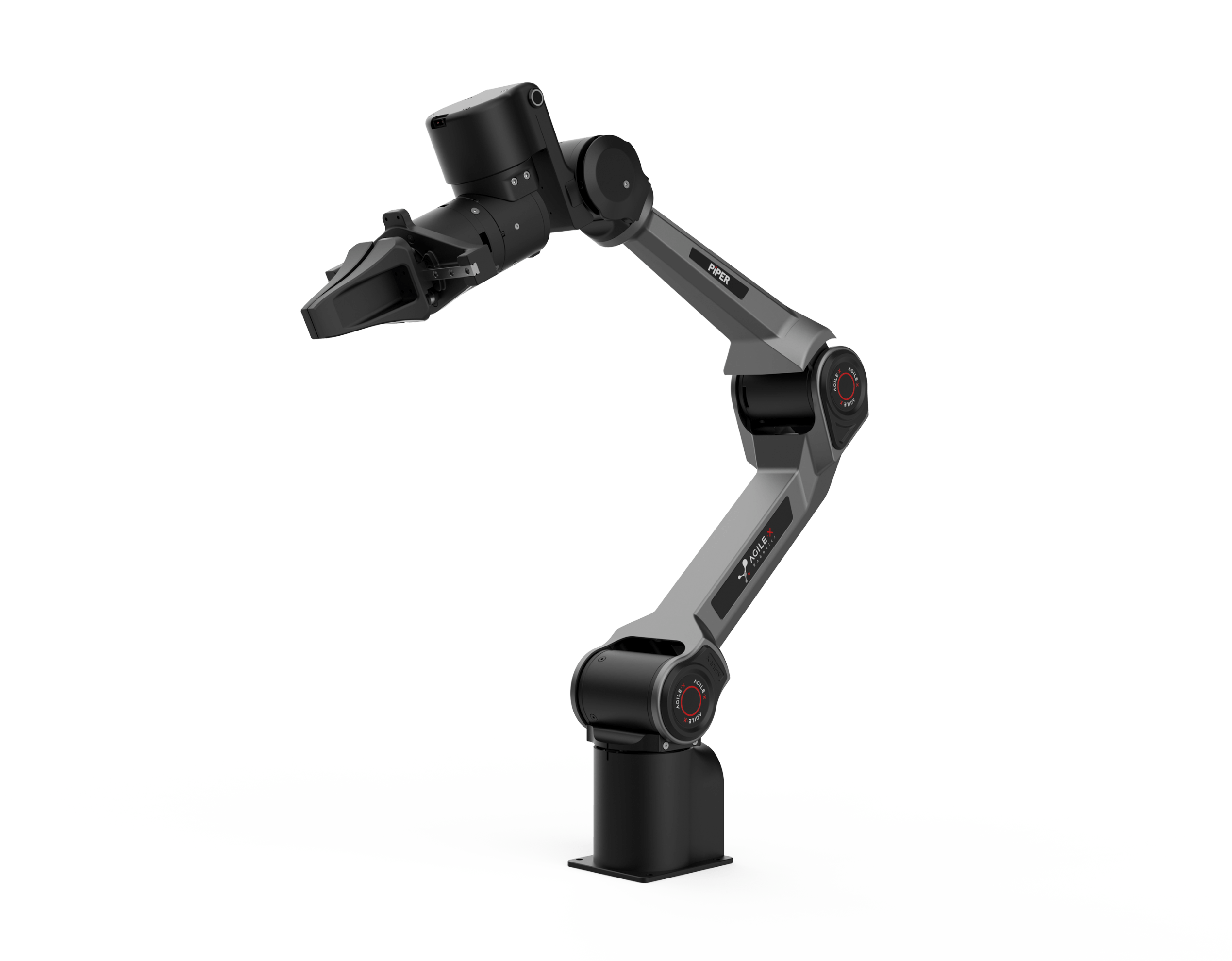
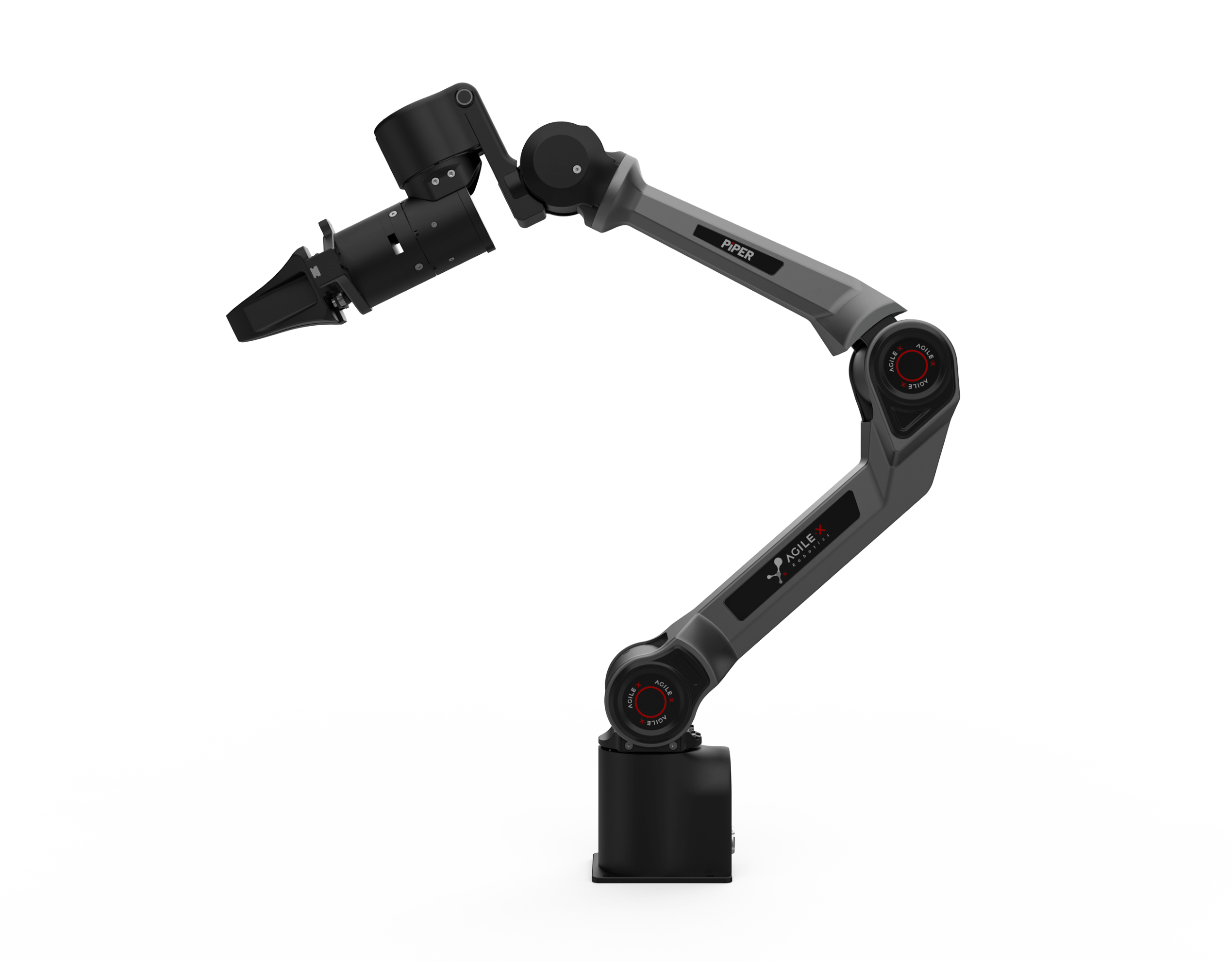
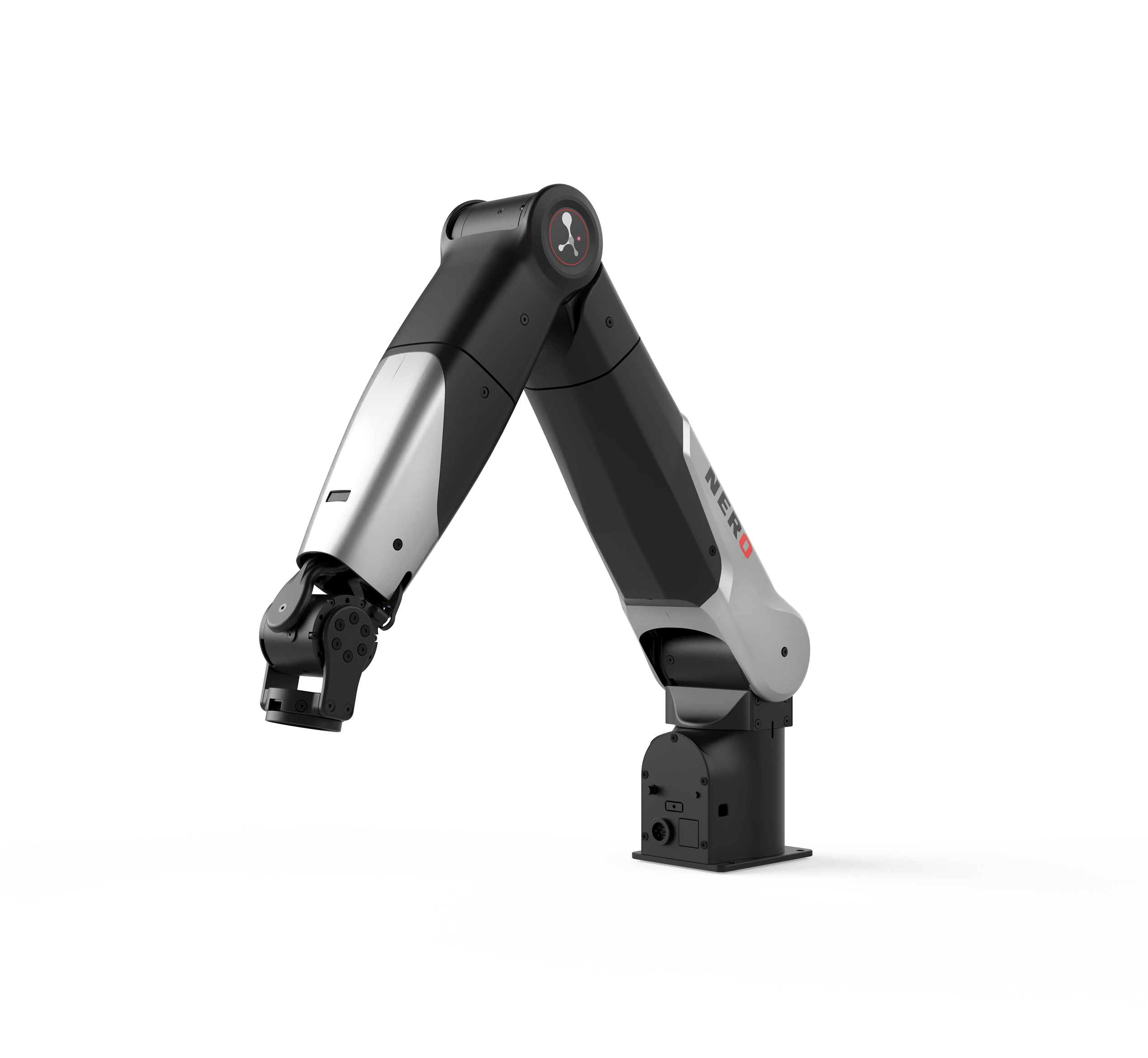
PiPER-X 专为空间受限或要求精确定位的科研场景升级未端关节配置,平衡了工作范围与结构强度,提供更敏捷的姿态调整,拓展复杂应用边界。
末端球形关节 高效灵活
J4/J5 关节对称 ±90° 旋转,J6 ±170° 回转,复现人类手腕运动特性,为具身认知、模仿学习、运动规划等研究提供接近人体的操作自由度。
末端球形关节 高效灵活
全栈开放接口
提供完善的 API(Python/C++ SDK)、ROS/ROS2 支持、CAN 总线底层通信,支持自定义控制策略、强化学习训练、多传感器融合与实时数据回传。
全栈开放接口
高精度 低延迟
±0.1mm 重复定位精度,毫秒级响应,配合拖动示教与轨迹复现功能,确保算法验证的可复现性;轻量化本体(4.5kg)便于桌面部署与多机协同实验。
高精度 低延迟
全方位,好好看
拖动模型全方位查看
*3D 效果仅作示意,具体效果请以实物为准。
同系列产品对比
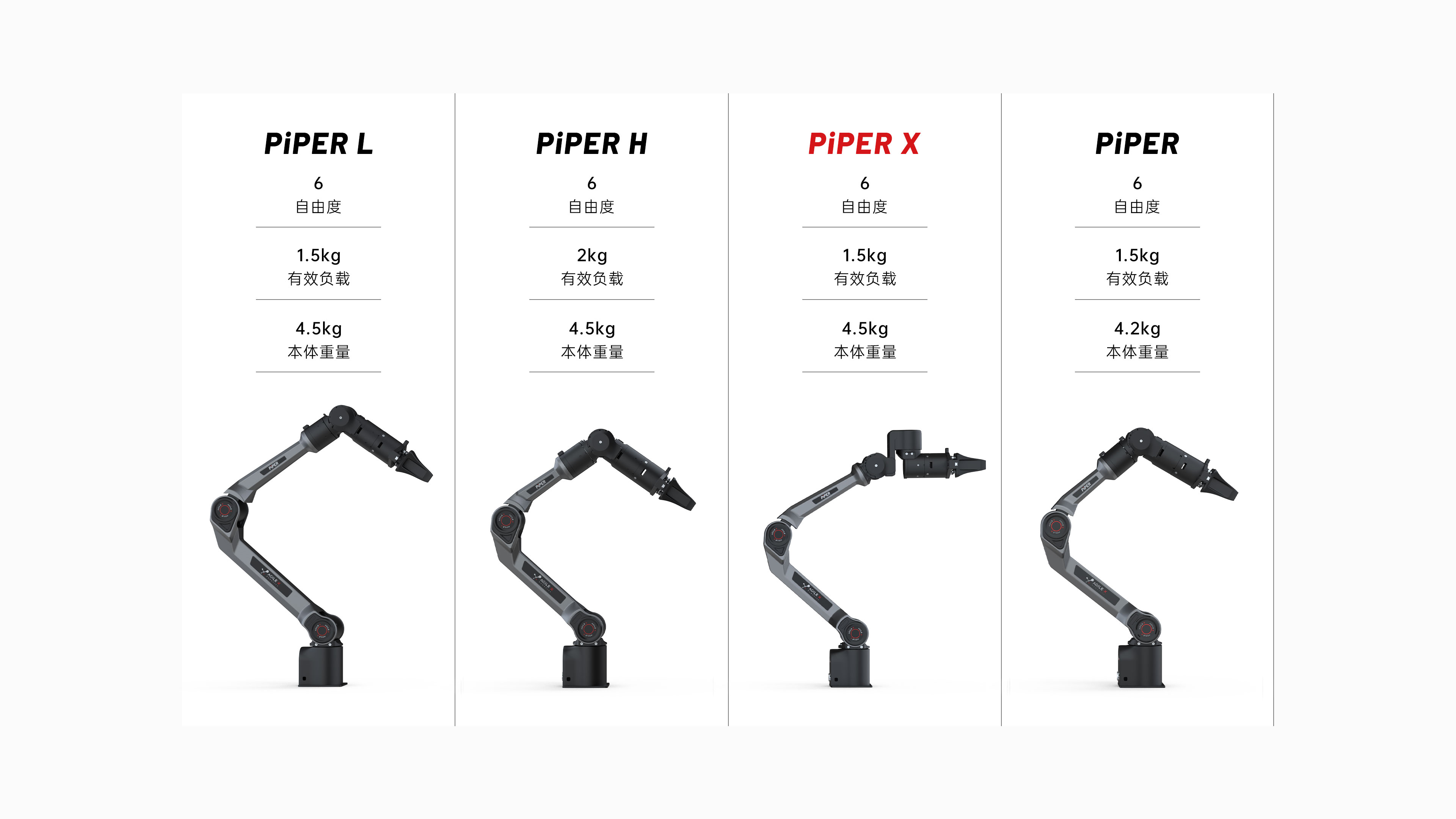
PiPER X
PiPER X
基本性能参数
自由度
6
有效负载
1.5kg
本体重量
4.5kg
重复定位精度
±.0.1mm
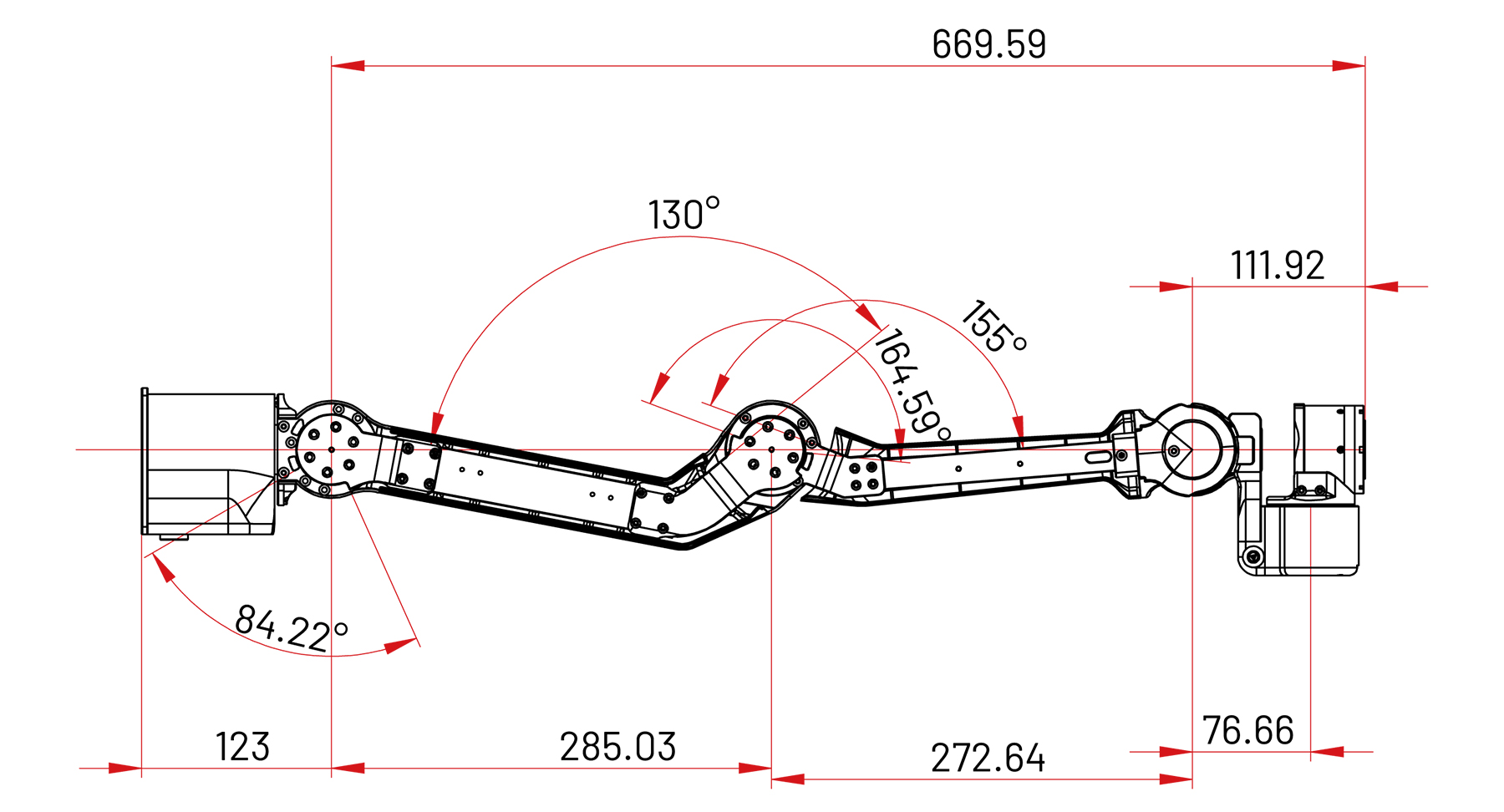
工作半径
669mm
供电电压
DC24V
结构参数
底座安装尺寸
70mm*70mm*M5*4
安装模式
台面安装
材质
铝合金骨架、塑料外壳
关节参数
关节运动范围
J1:-154°/154°
J2:0°/195°
J3:-175°/0°
J4:-90°/90°
J5:-90°/90°
J6:-165°/165°
关节最大速度
J1:180°/s
J2:195°/s
J3:180°/s
J4:225°/s
J5:225°/s
J6:225°/s
工作环境
温度:-20-50℃
湿度:25%-85%,非冷凝
噪音
<60dB
下载产品单页