







































产品亮点
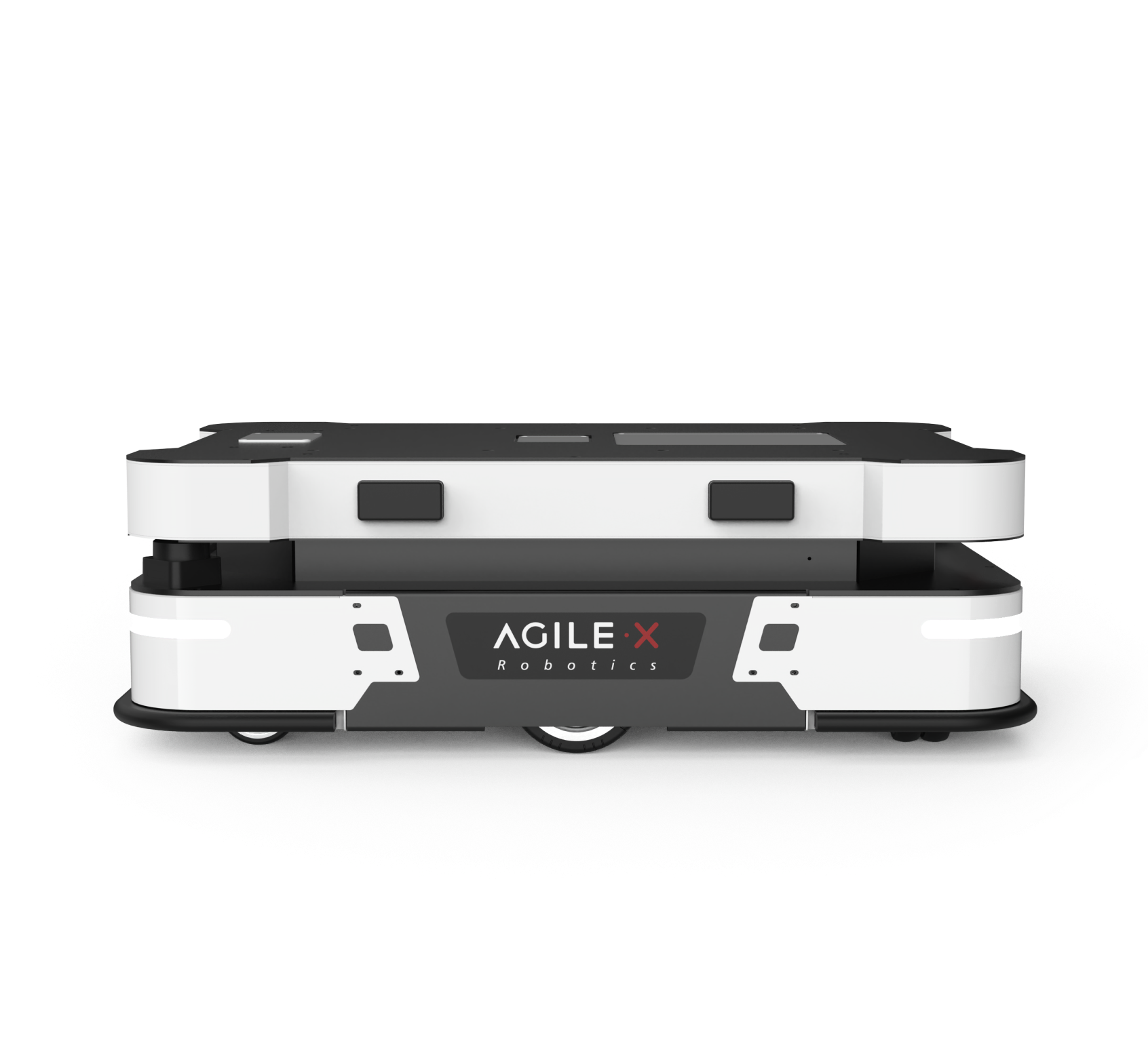
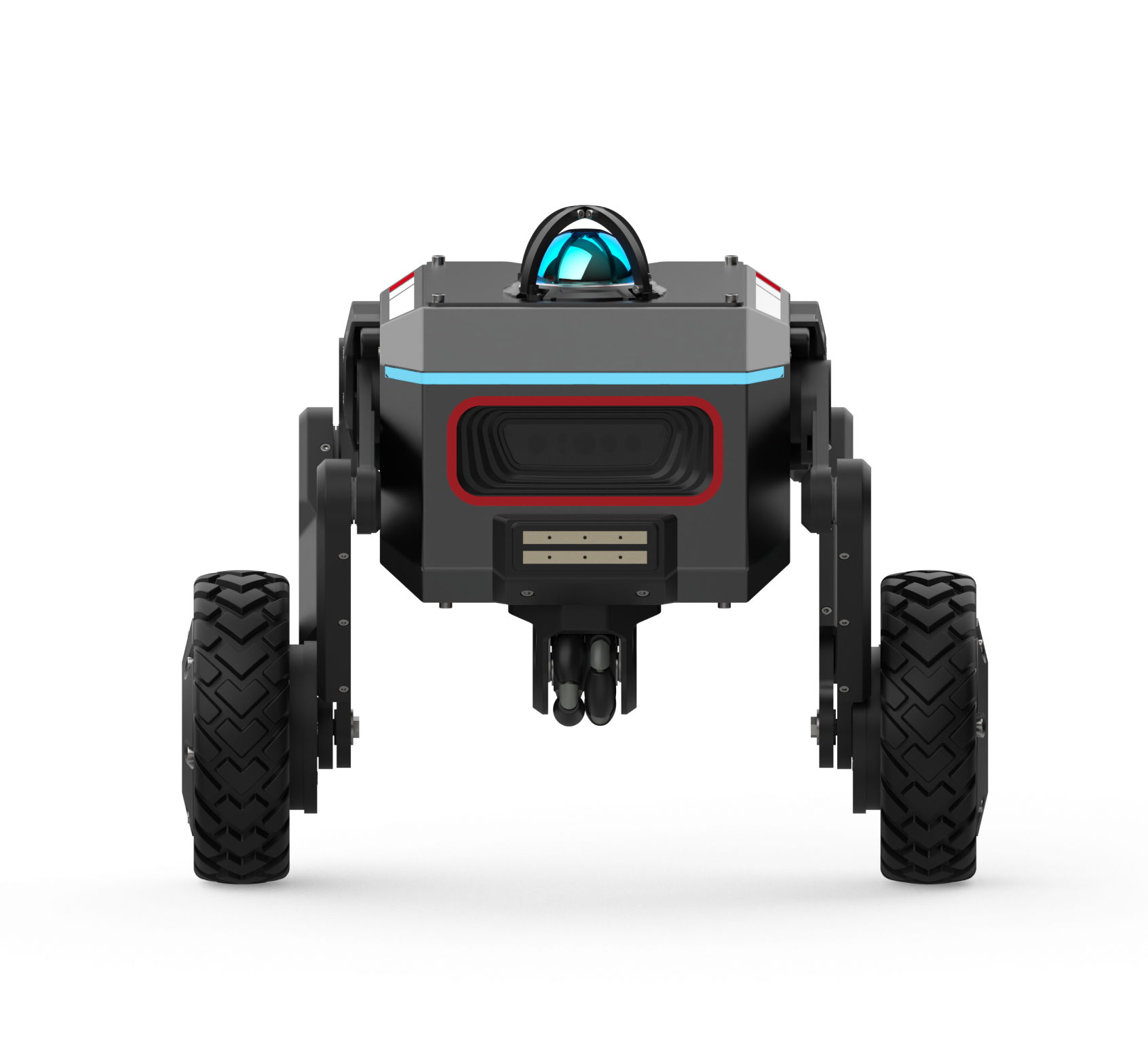
支持一键切换阿克曼、四轮差速、麦克纳姆轮和履带四种运动模式的 ROS 兼容教学与科研开发平台。
四模态全地形移动平台
用户可在不同场景下灵活调整运动策略——如在走廊使用阿克曼模式高效转向,在狭窄空间启用全向麦克纳姆轮,或在沙地/斜坡切换履带模式增强通过性,极大拓展了教学与实验的应用边界。
四模态全地形移动平台
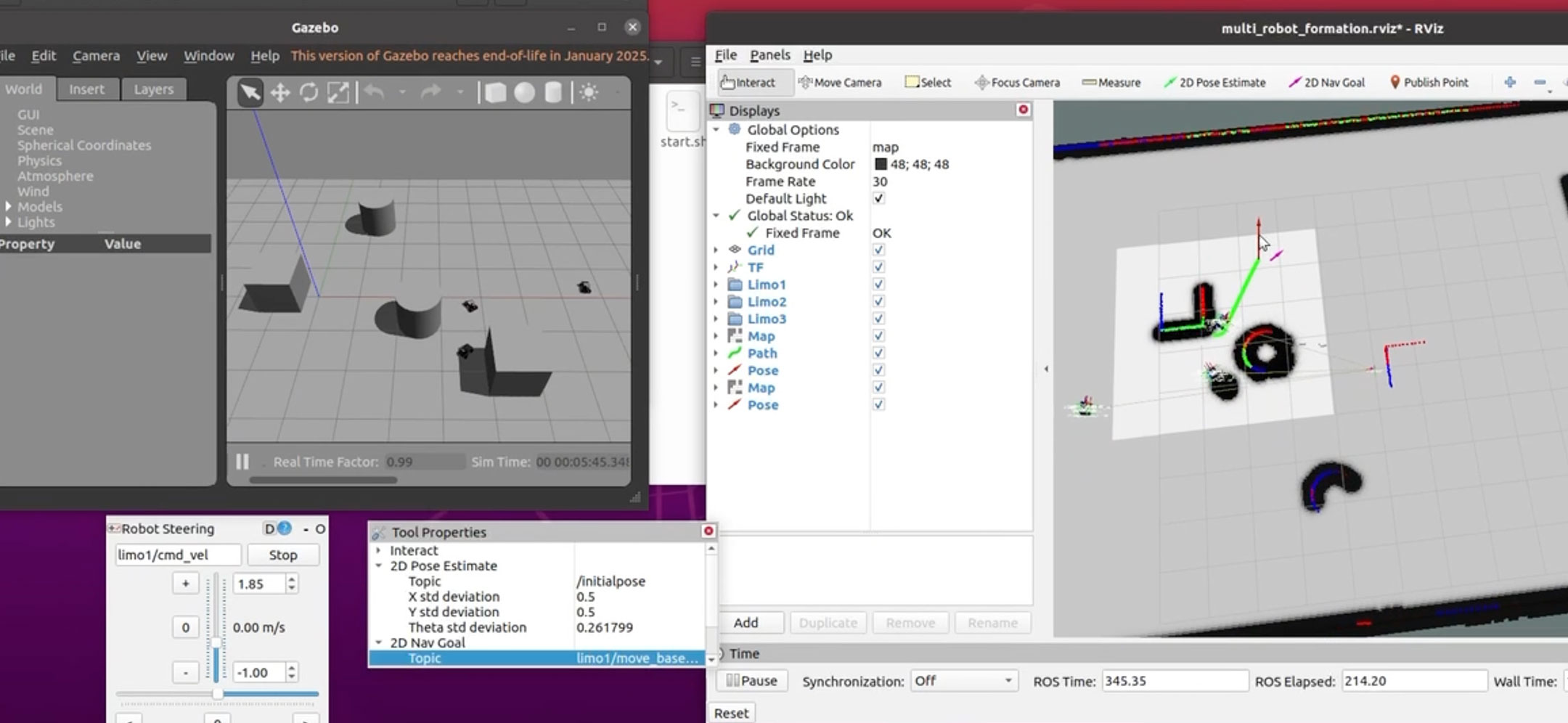
开放式 ROS/ROS2 开发架构
原生兼容 ROS 和 ROS2 生态,预装标准驱动包与导航栈,提供丰富的 API 接口与示例代码。
无论是SLAM调优、多机协同,还是自定义传感器集成,其都能作为可靠的底层移动平台,满足从本科实验到研究生科研的多样化需求。
开放式 ROS/ROS2 开发架构
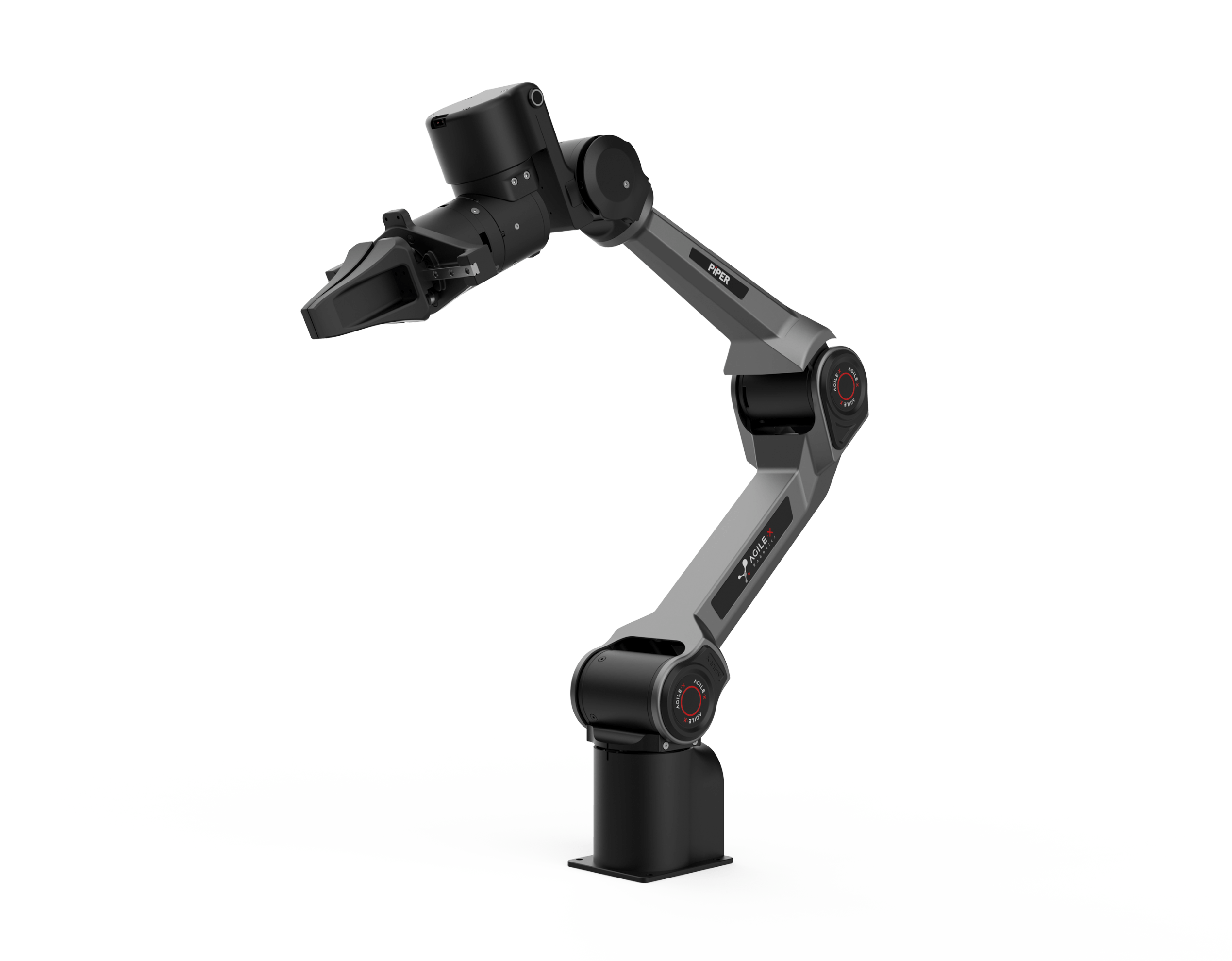
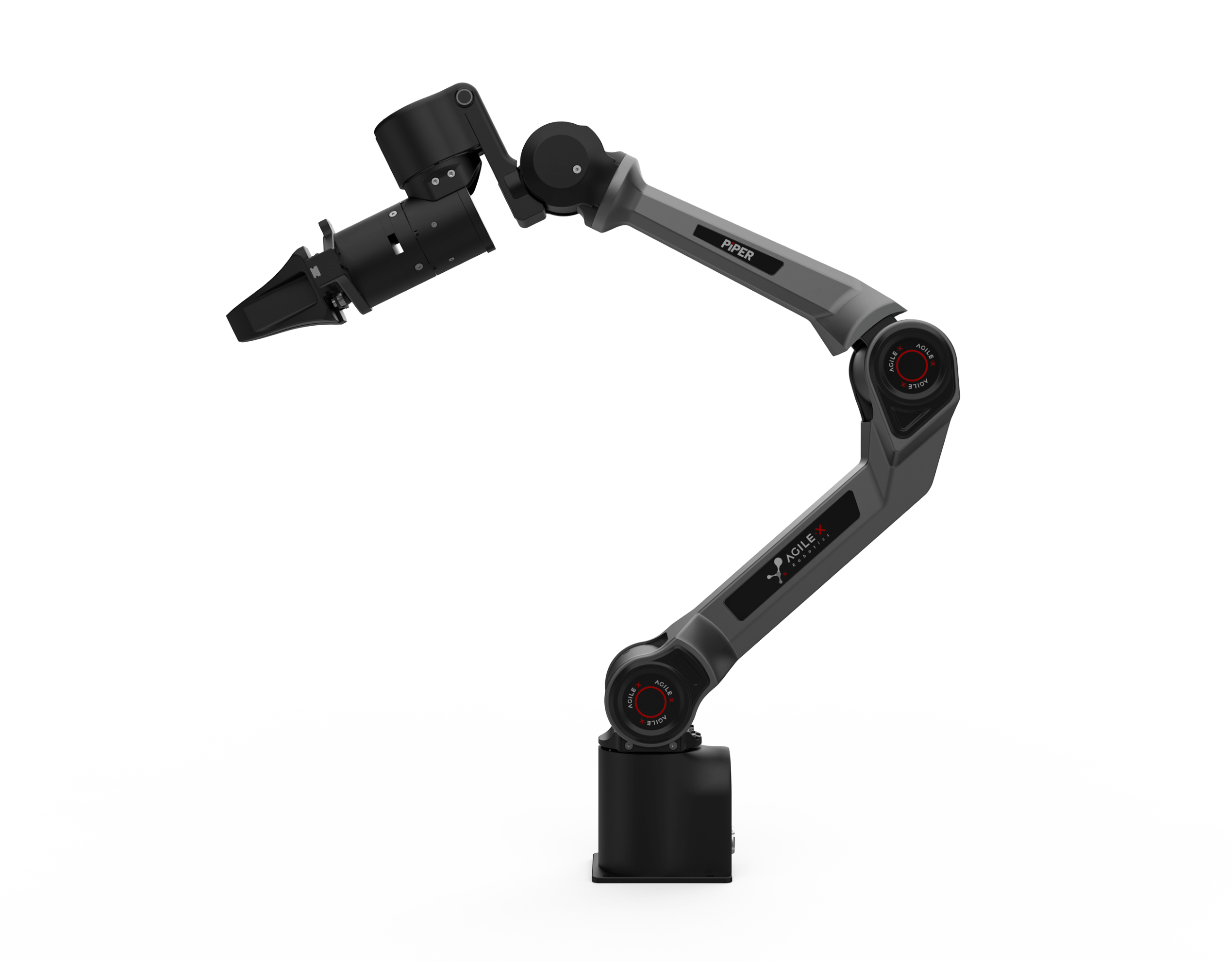
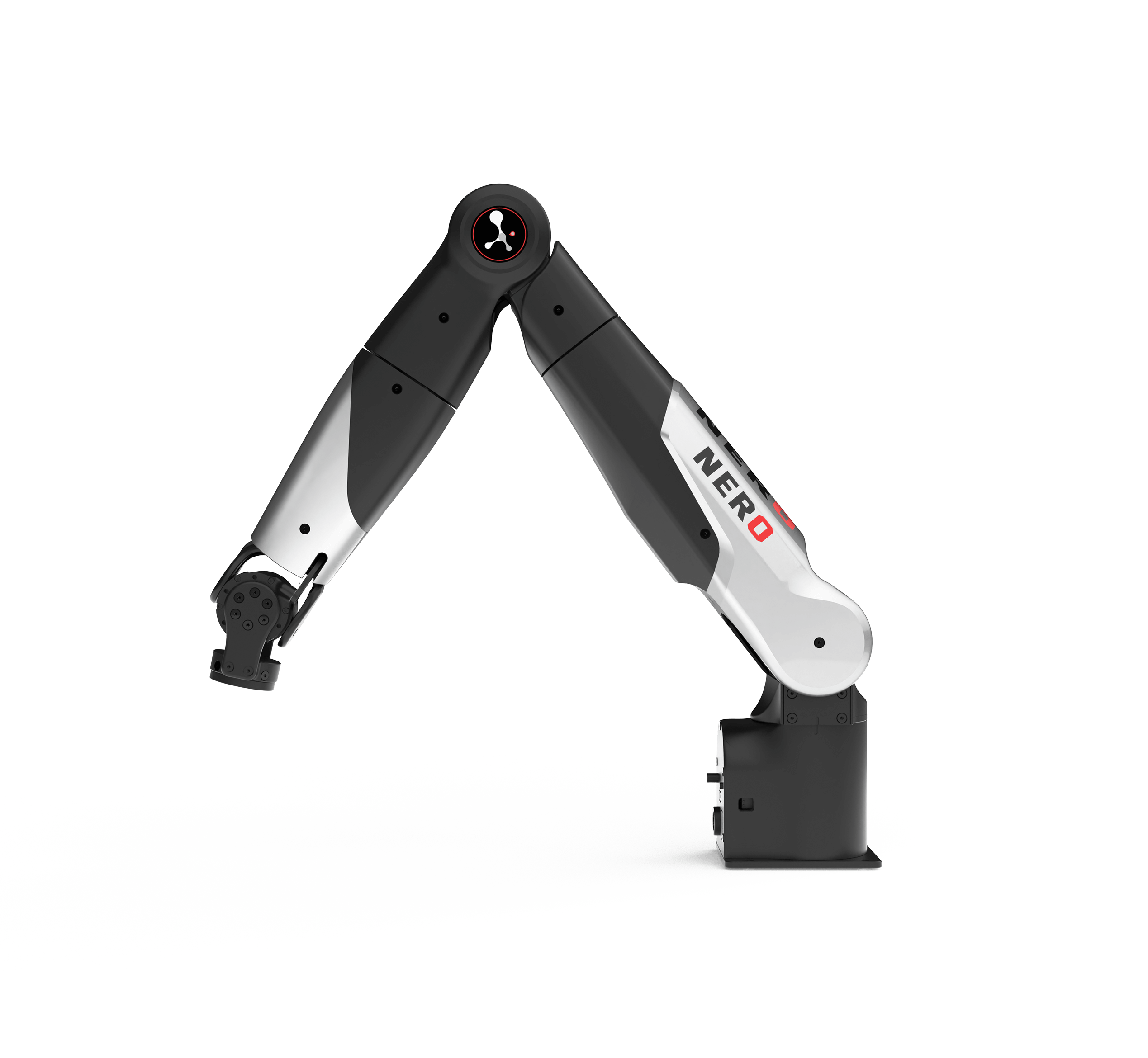
模块化扩展与教育场景适配
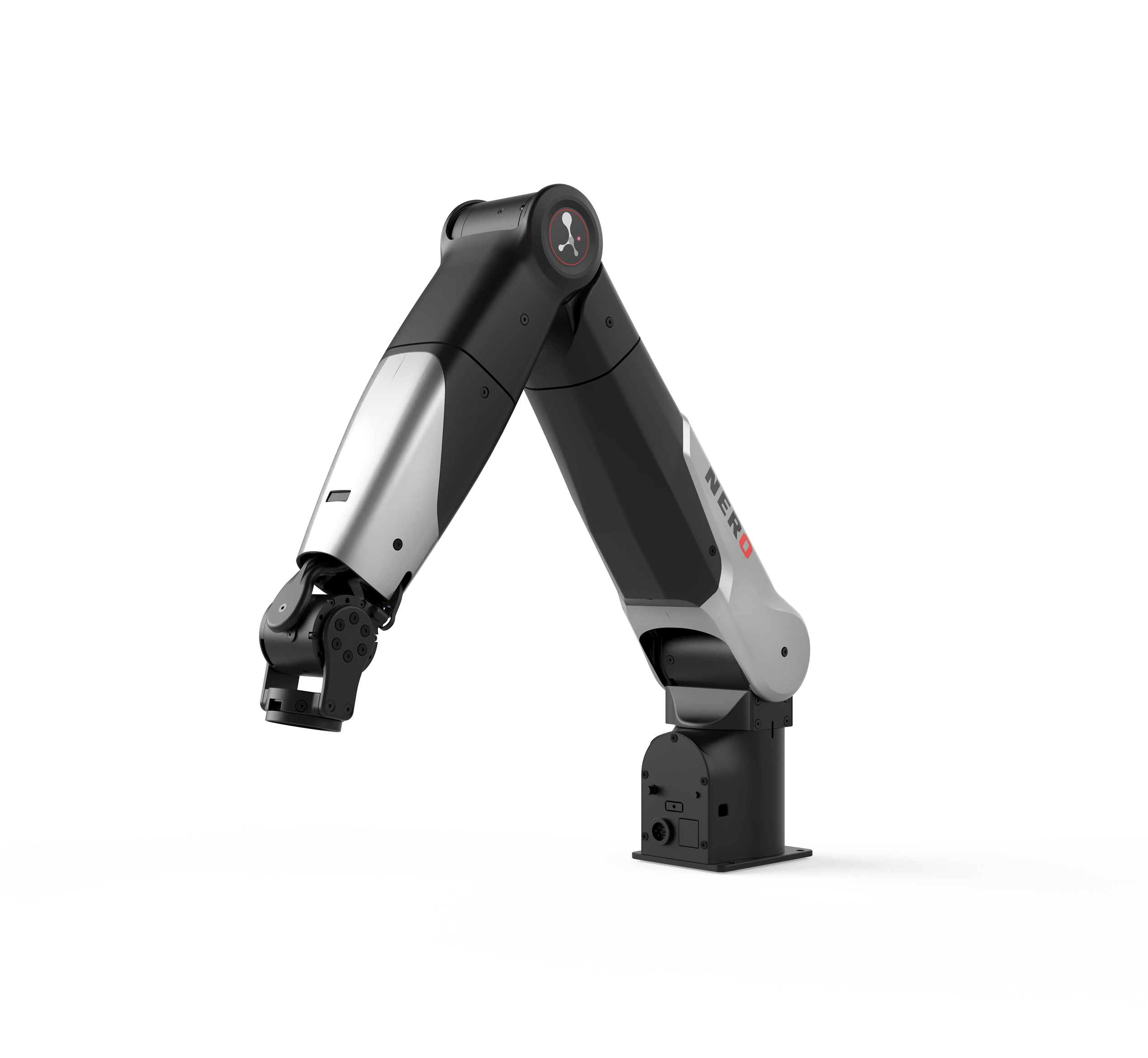
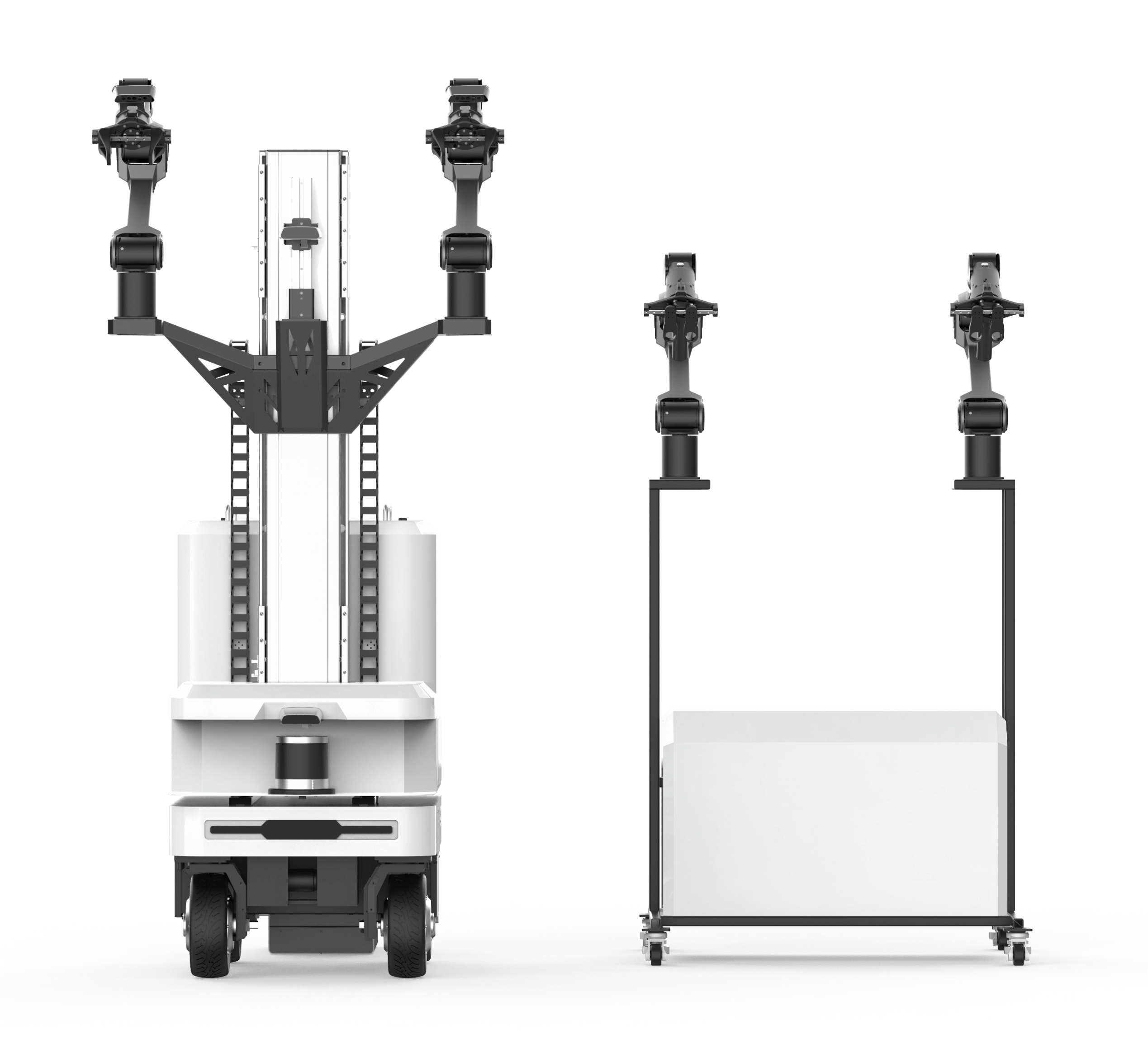
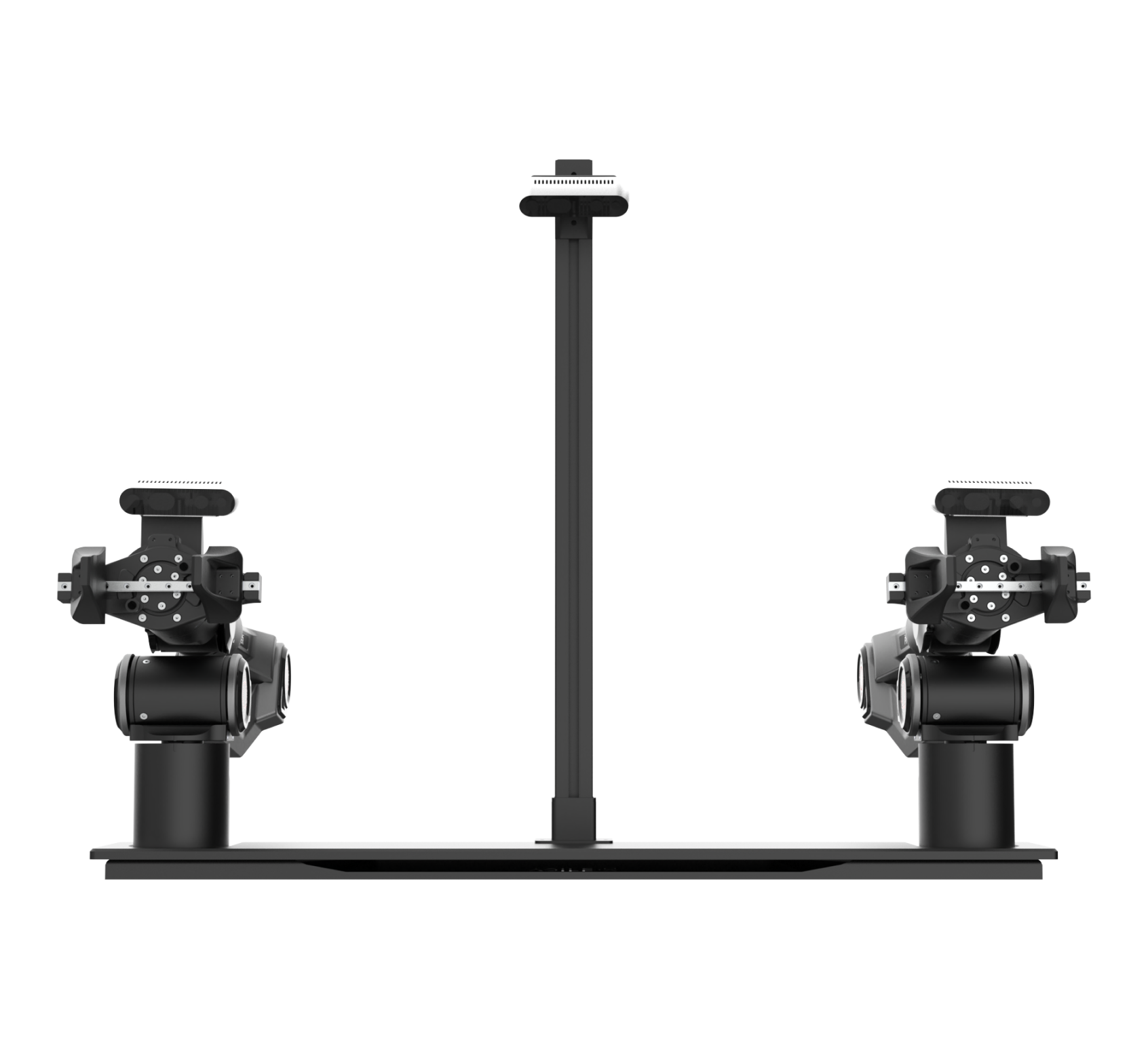
采用标准化顶部安装接口和电源管理设计,便于快速集成机械臂、升降云台、多目相机等上层模块。
配套实验指导书、PPT 课件与在线技术支持,显著提升教学效率与学生动手能力。
模块化扩展与教育场景适配
全方位,好好看
拖动模型全方位查看
*3D 效果仅作示意,具体效果请以实物为准。
机器人竞赛

高校/高职教育

多机协同
同系列产品对比
LIMO PRO

LIMO COBOT

LIMO PRO
LIMO PRO
机械参数
运动模式
履带模式
麦轮模式
阿克曼模式
四轮差速模式
轴距
-
轮距
-
最小离地间隙
24mm
整备质量
4.8kg
额定运动载重
-
制动与安全
刹车方式
-
工作温度
-10~40℃
防护等级
IP22
制动距离(空载,摩擦系数0.5)
-

行驶性能
续航时间
4h
越沟能力
-
越障能力
24mm
最大速度
1m/s
最大行程
12km
爬坡角度
25°
动力参数
充电时间
2h
可拆卸电池
YES
电池容量
10000mAh 12V
对外供电
-
电池类型
三元锂
电机类型
轮毂电机
下载产品单页