一款极具性价比的高速室内外穿梭线控底盘AGV开发平台
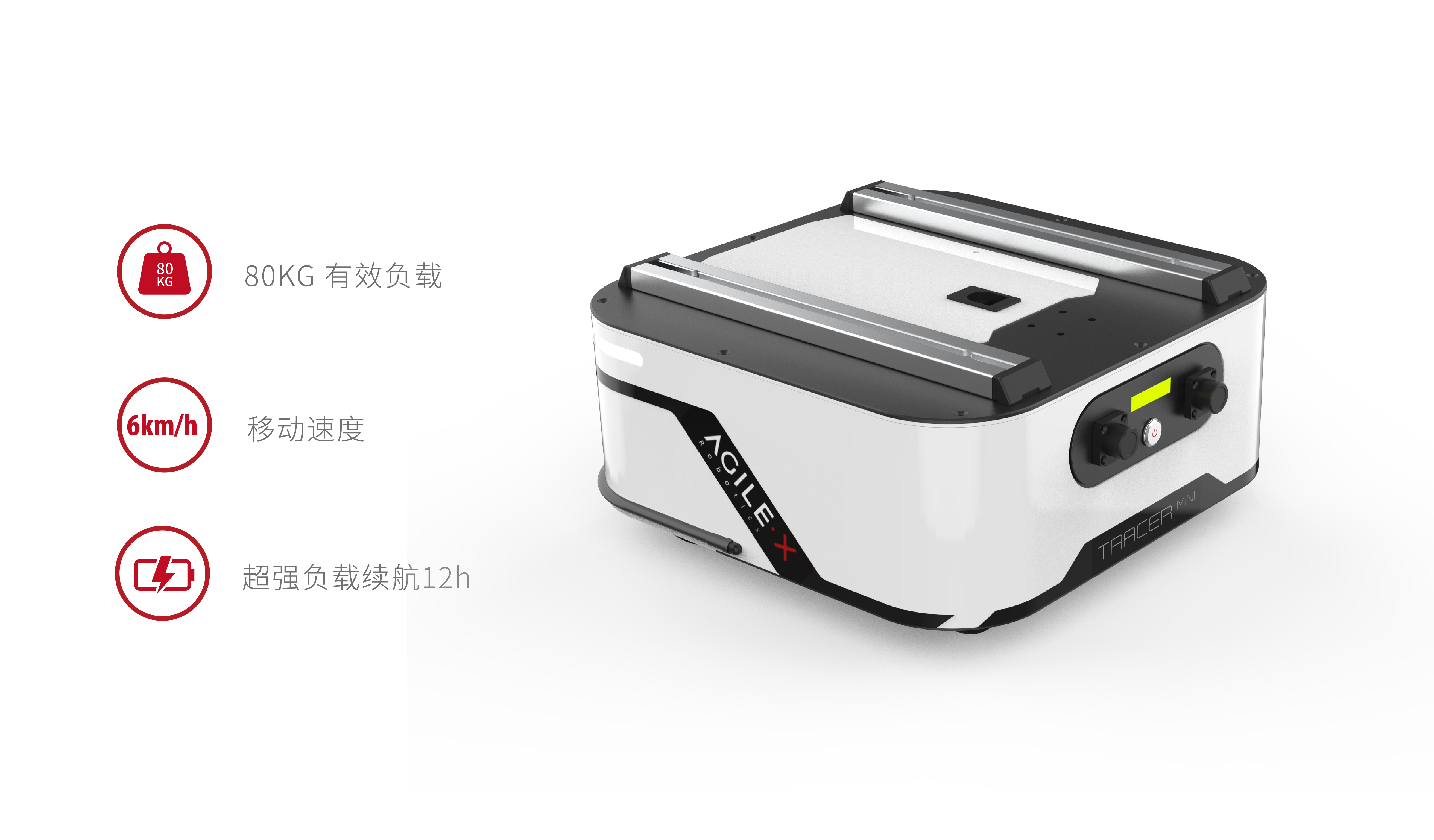
体积更为紧凑小巧。高速度、高承载能力及强劲动力的组合使它单次搬运效率有极大的优势,开发者可以快速搭载感知系统投入研究,成本低、效率高、部署快。 TRACER Mini的设计旨在让更多科研高校能够更快组建可靠的开发实验平台,实现ROS机器人科研教育、室内无人运输和服务机器人课题研究、项目开发;同时,也为商业级智慧工厂搬运和室内外服务机器人提供了更好的开发平台。
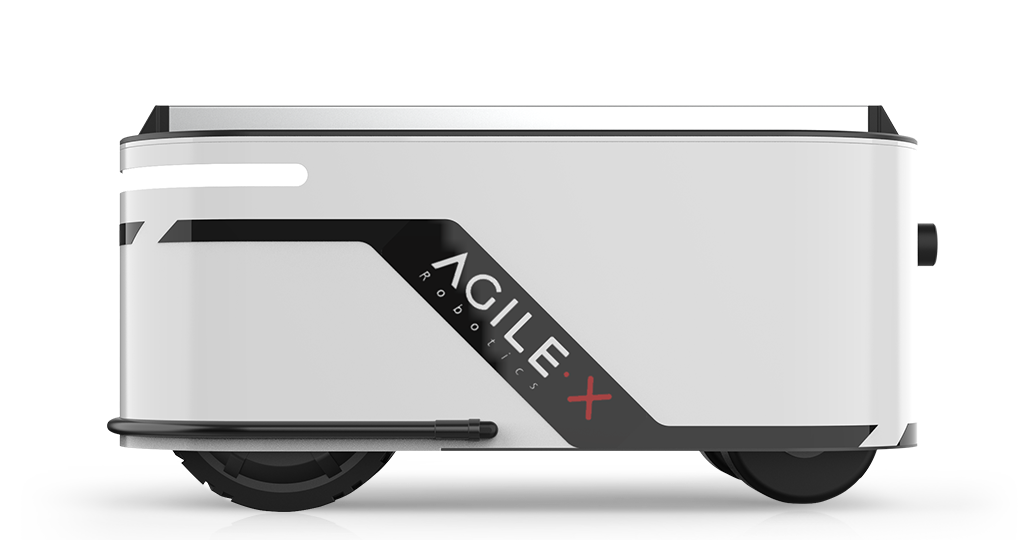
TRACER MINI
TRACER Mini具有摇摆臂悬挂钢质车身,采用两轮驱动带动万向轮的设计,可实现差速自转,不仅具有爬越小坡的动力,也带来了室外常规路面环境适应性。

结构精简 承载极强
TRACER Mini兼具高速度、高承载能力及强劲动力的性能组合,使得单次搬运效率有极大的优势,让无人仓储机器人运输成本低、效率高。

全面开源软硬件,拓展智能系统
TRACER Mini 移动底盘预装相关ROS节点,可适配轻量级操作模式。用户可通过CAN总线协议与主控通讯,拓展丰富的智能系统,包括完全开源的软硬件平台、外拓硬件支持,以及更高级的自动驾驶系统。
快速搭载,投入核心应用研究
提供便捷的专业的开发平台,还致力于搭建丰富的软硬件开发生态:为开发者提供详细的开发手册文档,ROS机器人开发教程、开源SDK、ROS_PACKAGE,以及提供专业的技术支持。
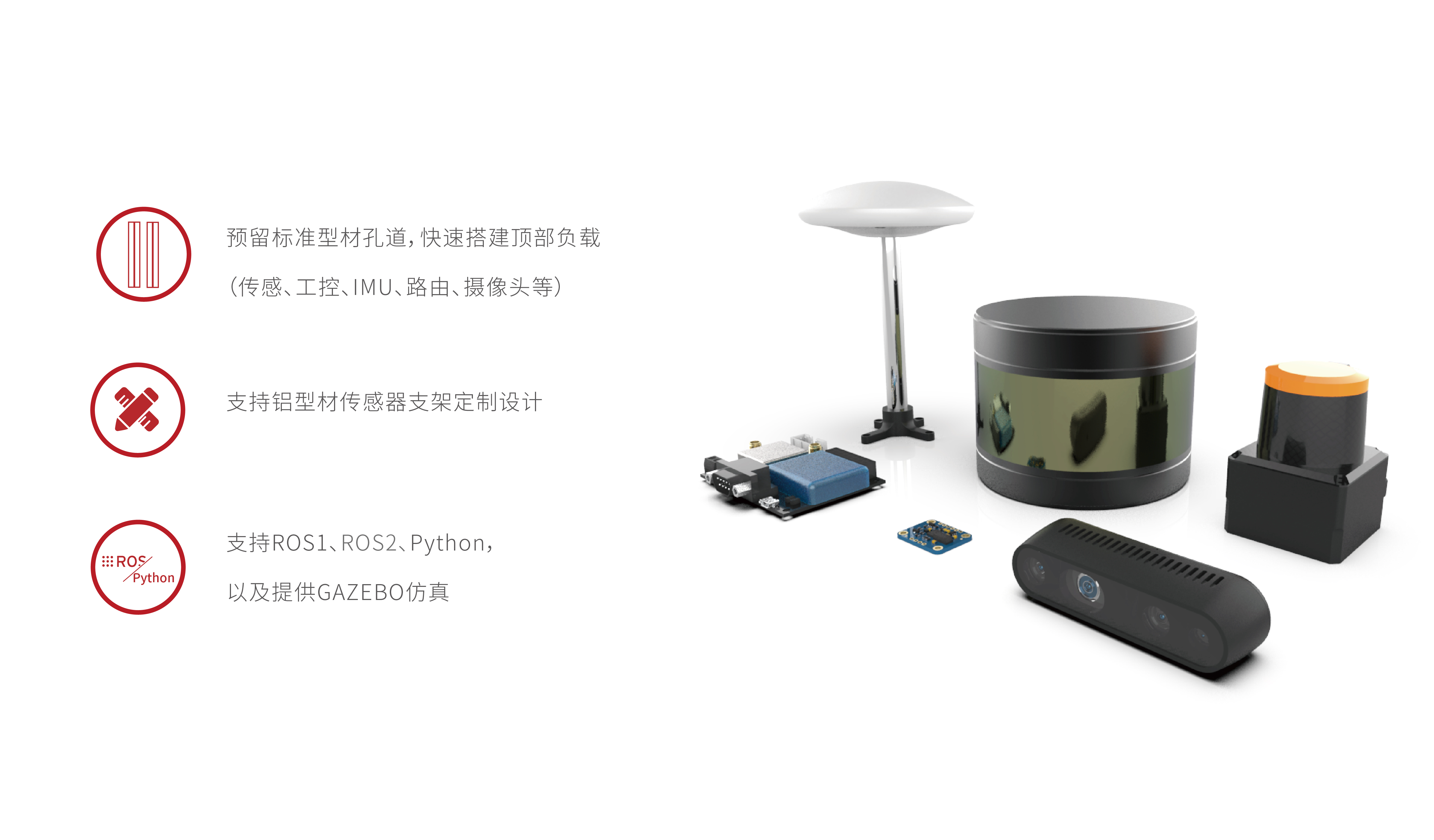
多负载拓展 二次开发
TRACER mini可适配轻量级操作模式,用户可通过CAN总线协议与主控通讯,同时提供开源SDK、ROS PACKAGE。
技术参数