











































产品亮点
为具身智能、人形机器人研究与复杂任务场景,提供更仿人、更灵活的移动操作核心。
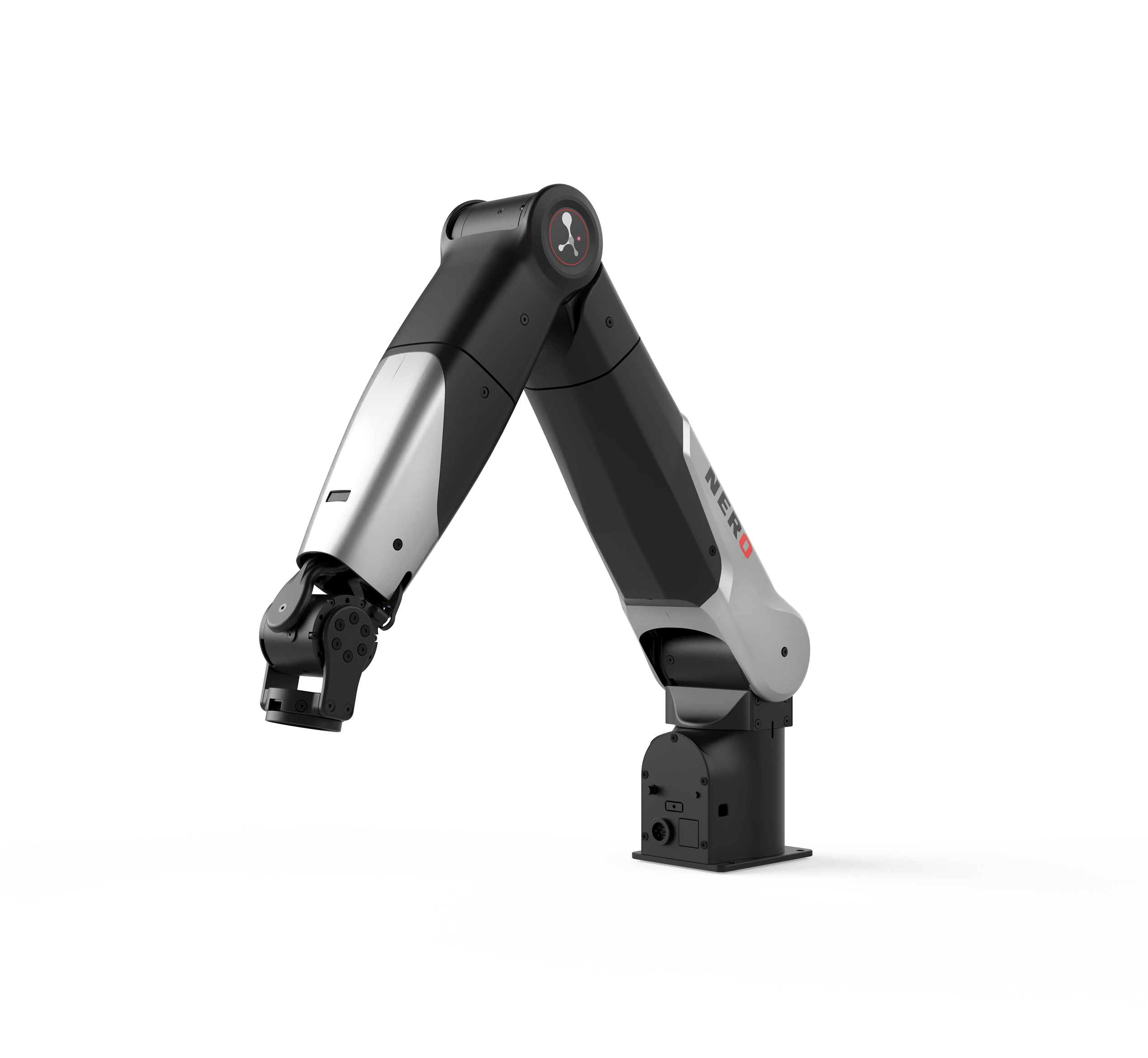
冗余自由度设计
NERO 采用仿人七轴冗余构型,不仅复刻了人类手臂的运动特性,更凭借冗余自由度实现,更自然、更拟人的运动表现,为具身智能科研、人形机器人上肢提供理想解决方案。
冗余自由度设计
轻巧便携 易部署
• 自重仅 4.8kg,单手可轻松提起,末端负载达3kg,支持负载典型传感器模组;
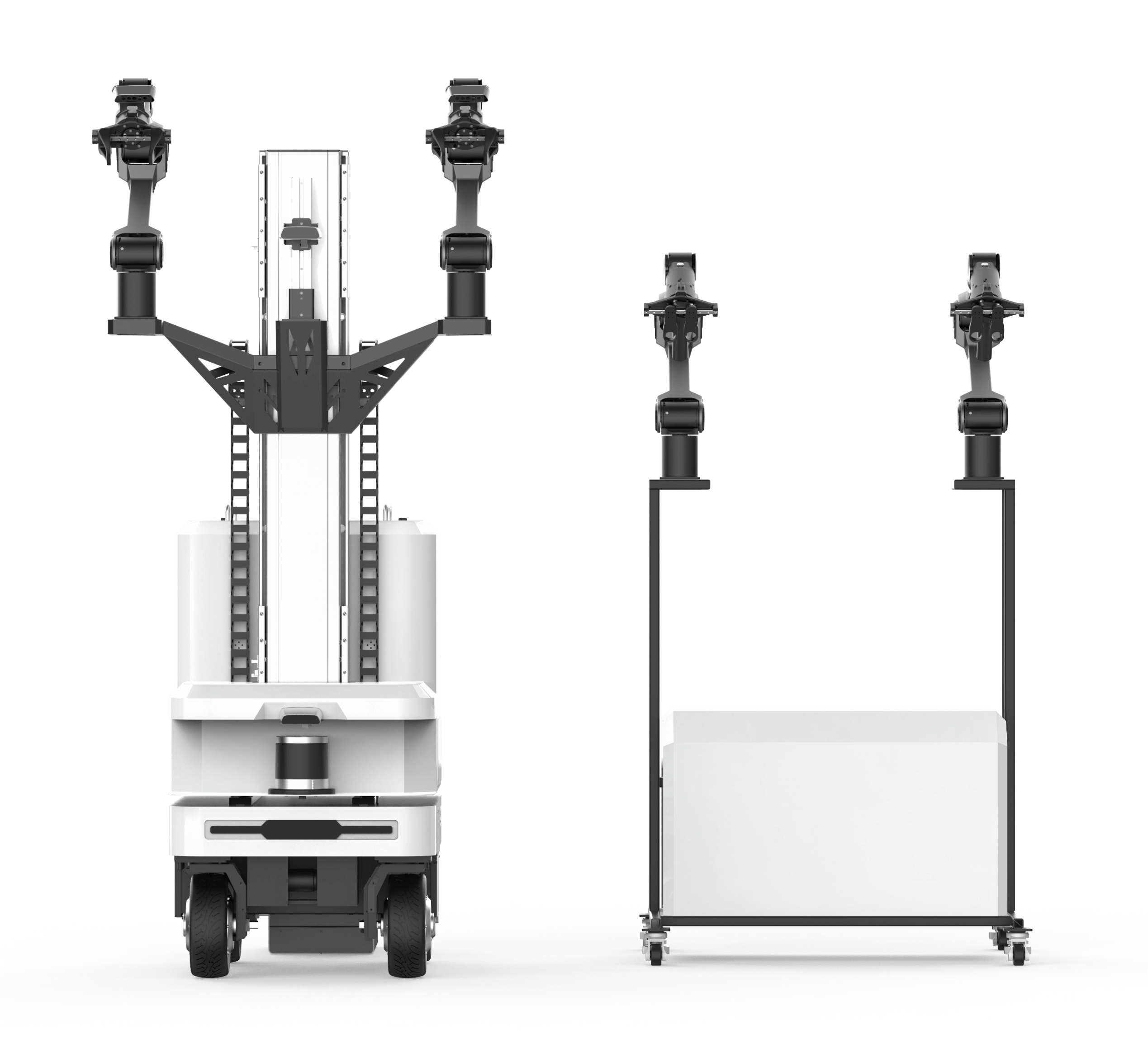
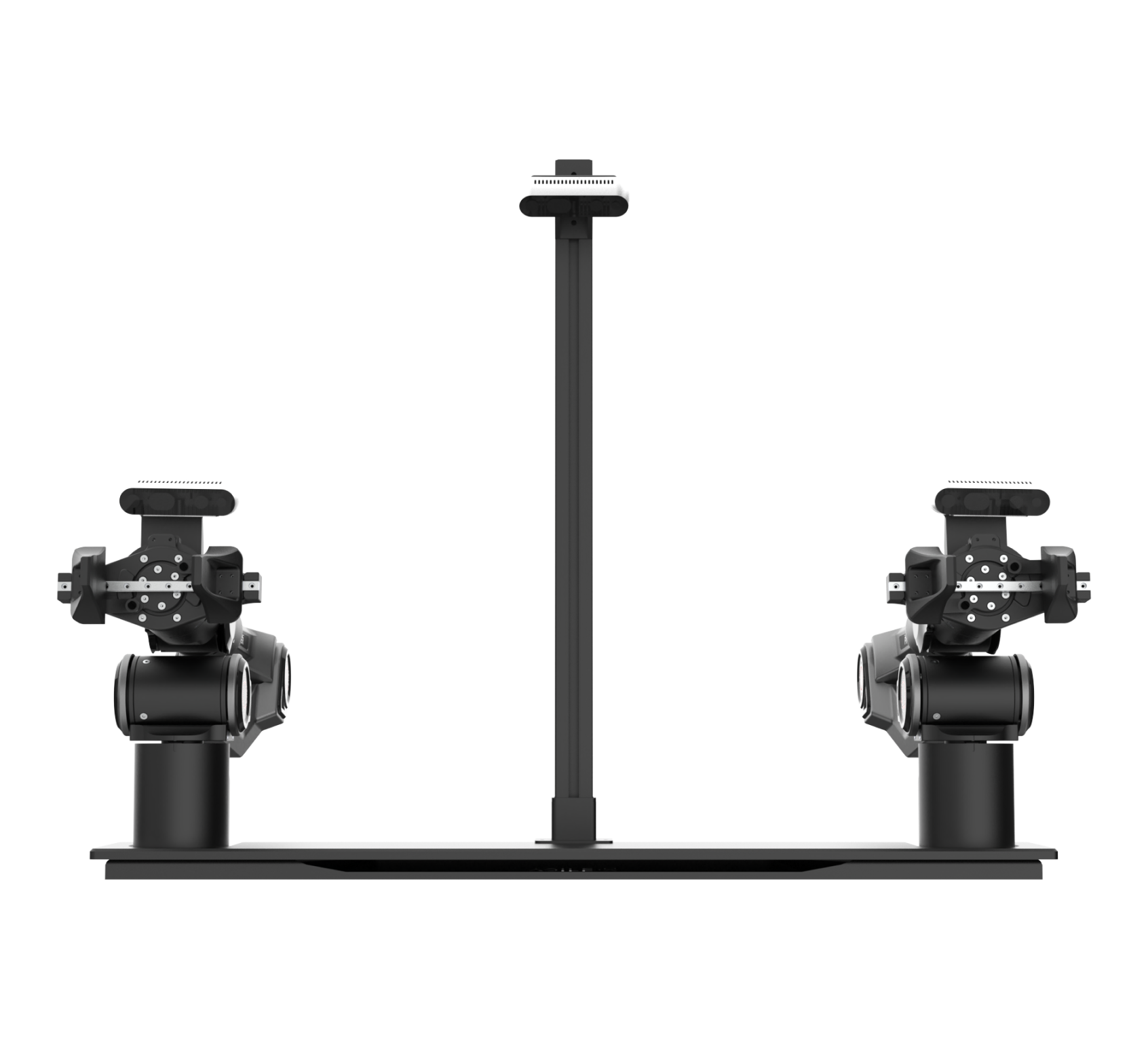
• 配备G型夹+桌面固定器,支持台面、侧装、倒装 多种安装方式
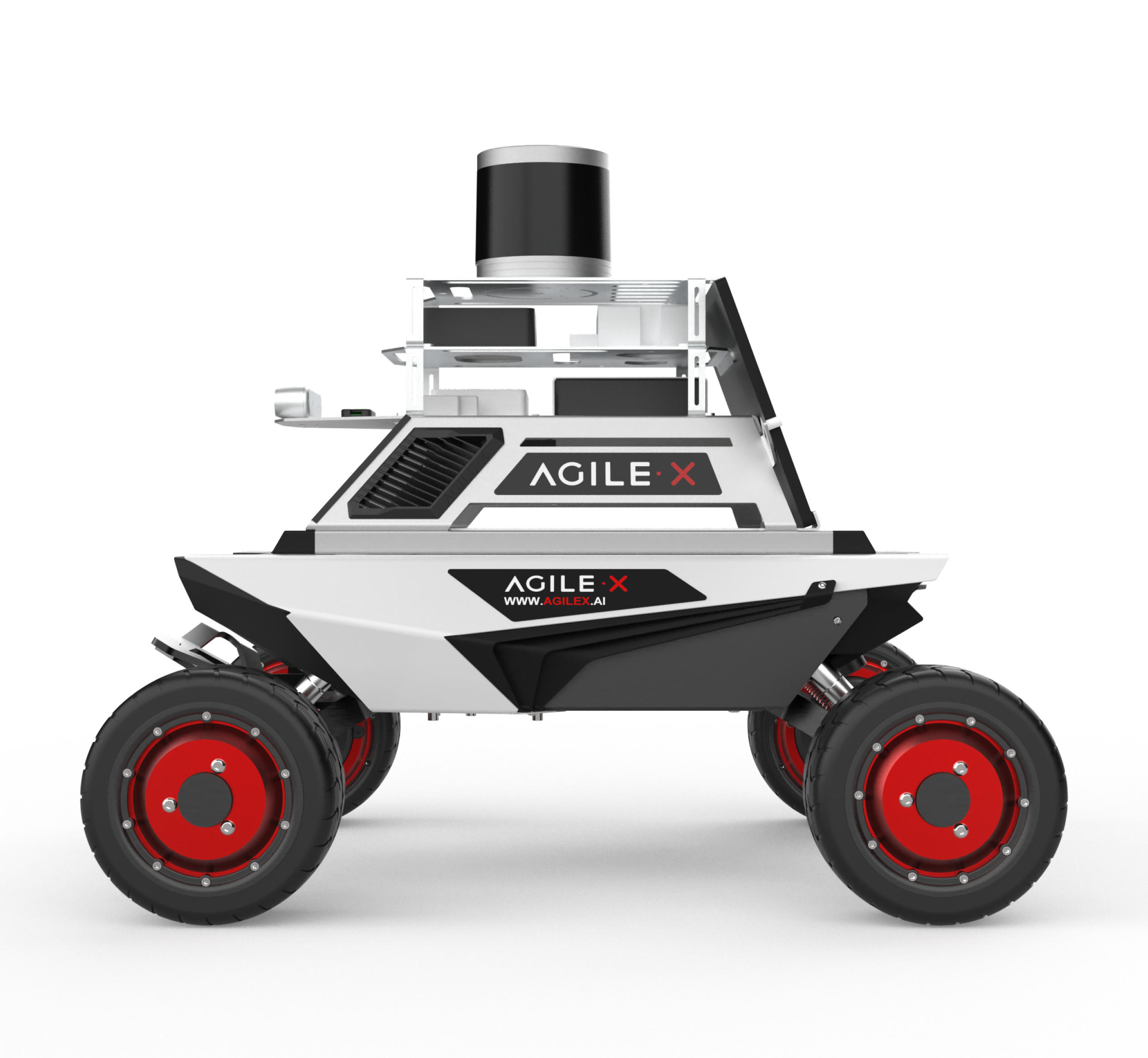
•适配松灵全系列移动底盘,轻松构建“移动+协作”一体化具身平台
轻巧便携 易部署
开放架构,快速二次开发
• 通信协议:支持 CAN、TCP、HTTP
• 软件生态:提供 Python SDK,全面兼容ROS1、ROS2
• 控制模式:支持拖动示教、离线轨迹规划、API 编程及上位机控制
开放架构,快速二次开发
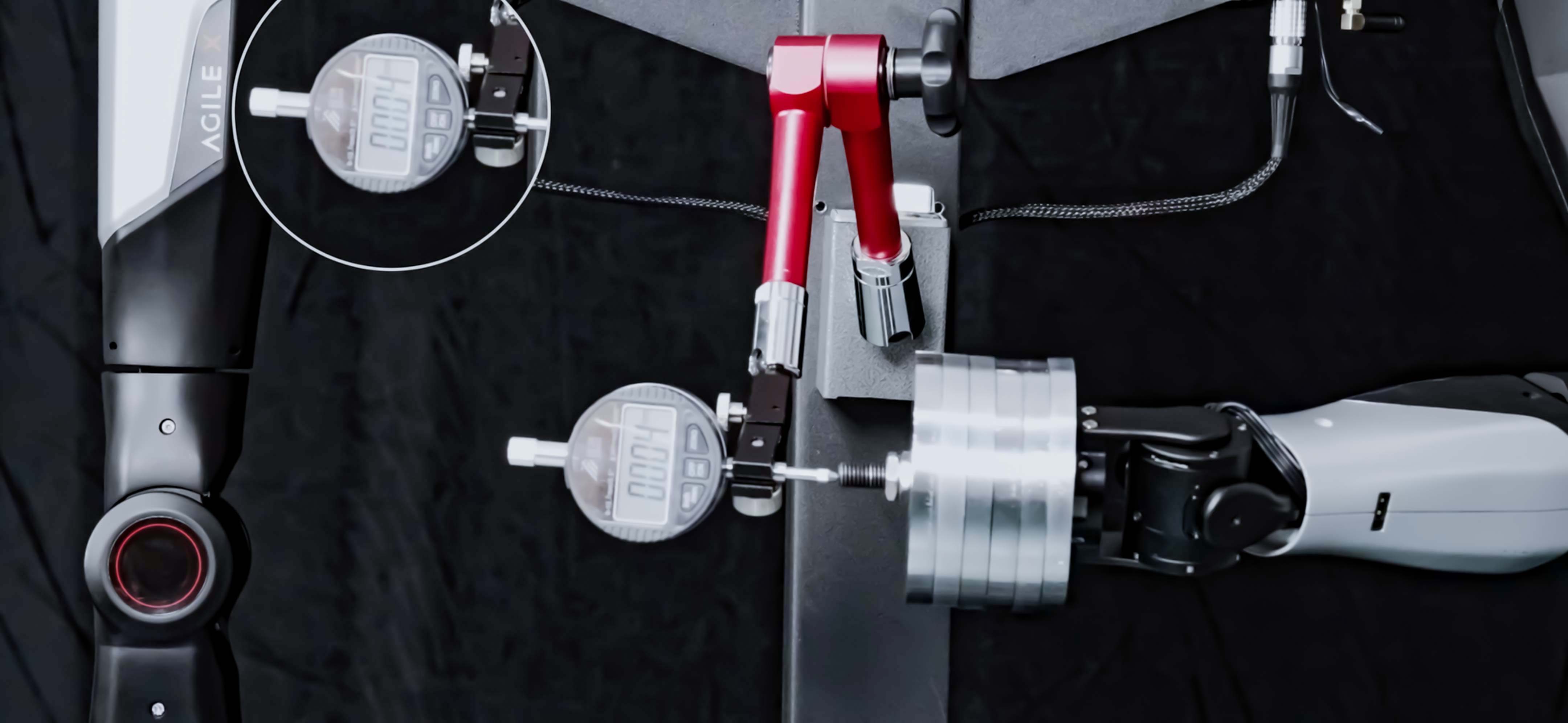
精准可靠,安全智能
• 重复定位精度达 ±0.1 mm,满足精密操作需求
• 内置碰撞保护,保障安全人机协作;
• 综合功耗 ≤60 W,峰值功耗 ≤150 W
精准可靠,安全智能
全方位 好好看
拖动模型全方位查看
*3D 效果仅作示意,具体效果请以实物为准。
人形上肢
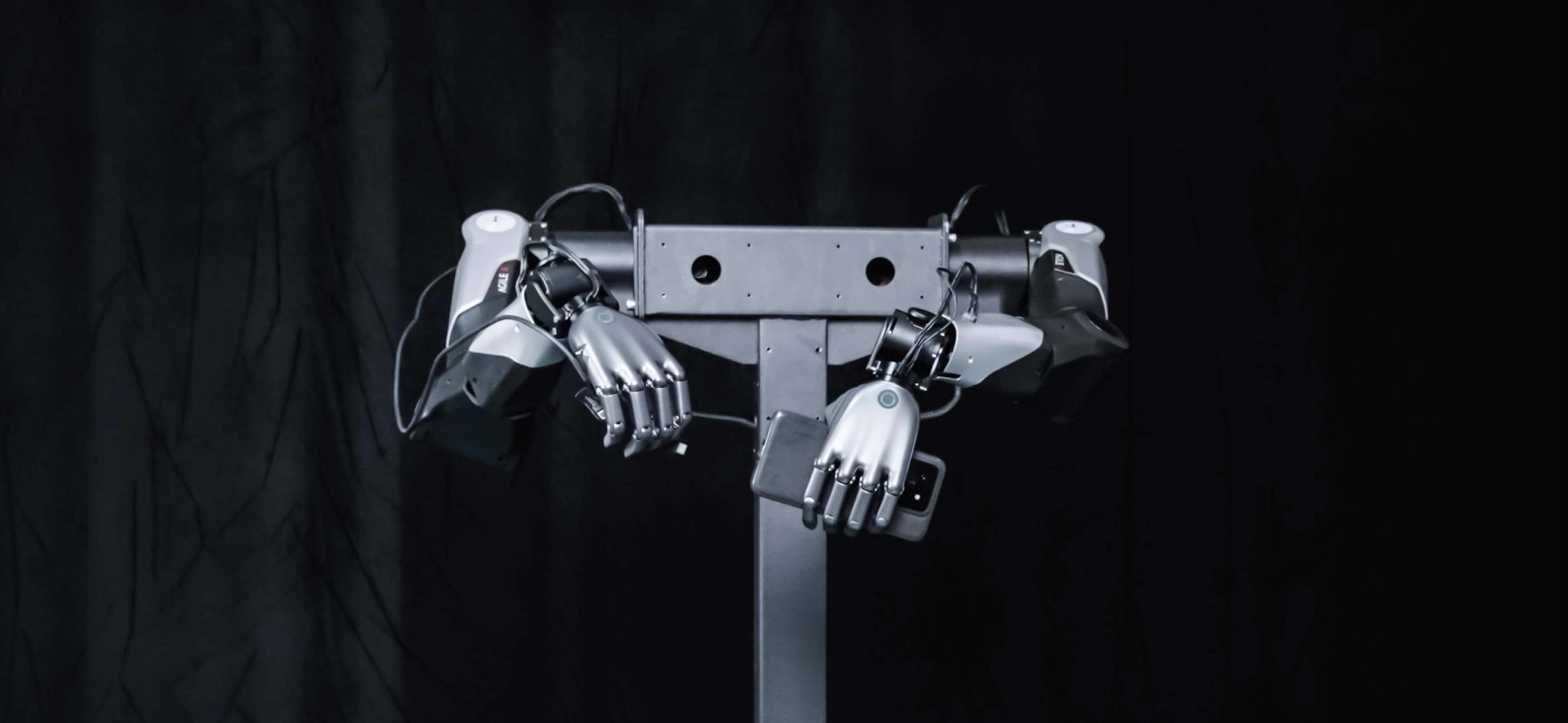
具身遥操

精密操作
同款产品对比
NERO 7 DoF

PiPER 6 DoF

NERO七轴机械臂
NERO七轴机械臂
基本性能参数
自由度
7
有效负载
3kg
本体重量
4.8kg
重复定位精度
±0.1mm
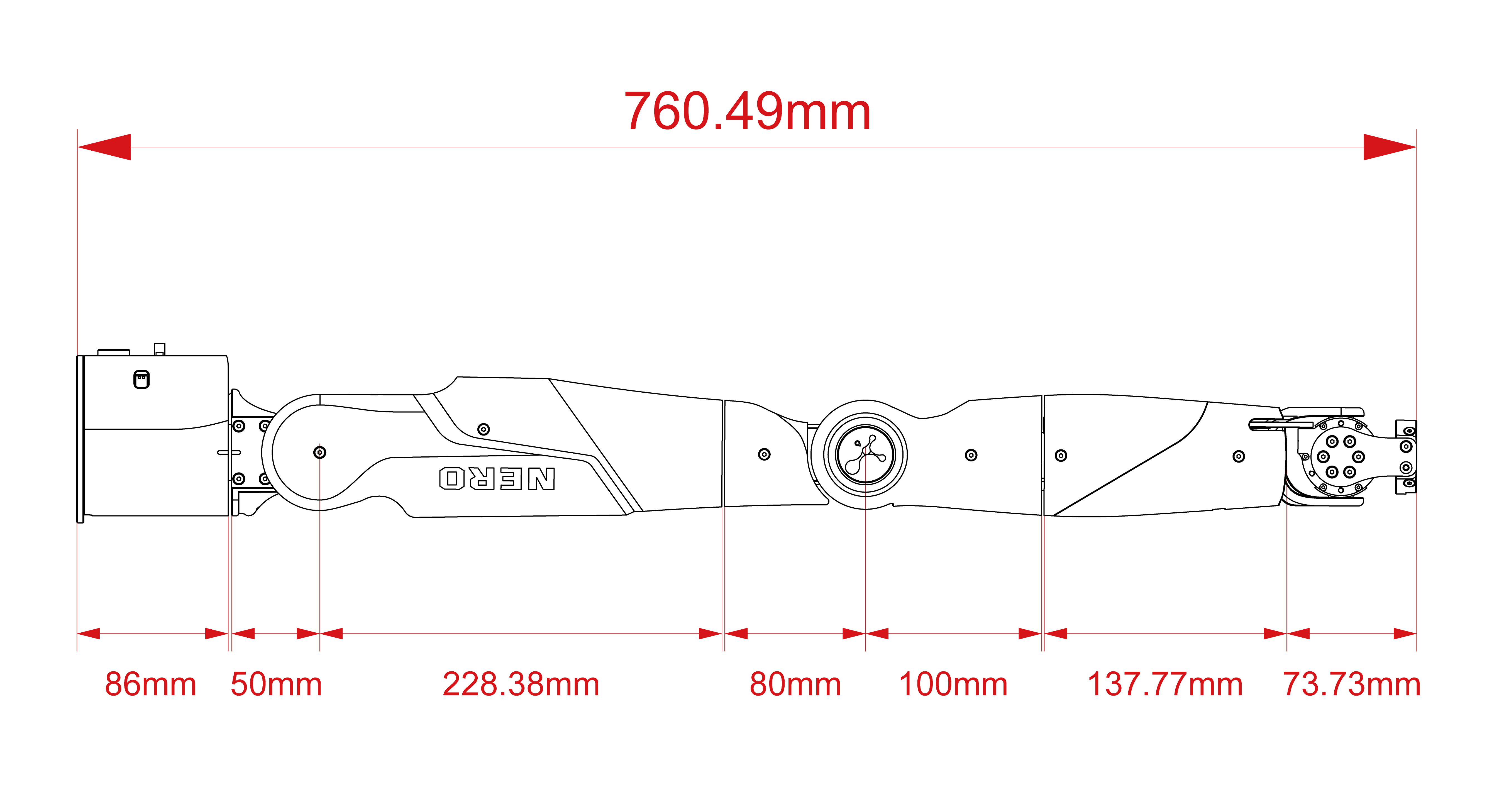
工作半径
580mm
供电电压
DC24V
结构参数
底座安装尺寸
70mm*70mm*M5*4
安装
台面安装;侧装;倒装
材质
铝合金骨架、塑料外壳
关节与其它参数
关节最大速度
J1:180°/s
J2:180°/s
J3:180°/s
J4:225°/s
J5:225°/s
J6:225°/s
J7:225°/s
关节运动范围
J1:-157°~157°
J2: -15°~190°
J3:-160°~160°
J4: -60°~125°
J5:-160°~160°
J6: -43°~-58°
J7: -90°~ 90°
工作环境
温度:0-50℃
湿度:25%-85%,非冷凝
噪音
<60dB
外部接口
电源接口*1,CAN接口*1,网口*1
功耗
最大功耗≤150W ;综合功耗≤60W
下载完整版参数PDF