







































产品亮点
基于RANGER MINI3.0搭建的主从分式双臂遥操系统,搭载完善的导航系统,提供升降ROS驱动,兼顾自主移动与自主抓取,适用于远程遥控、具身与移动协作等应用
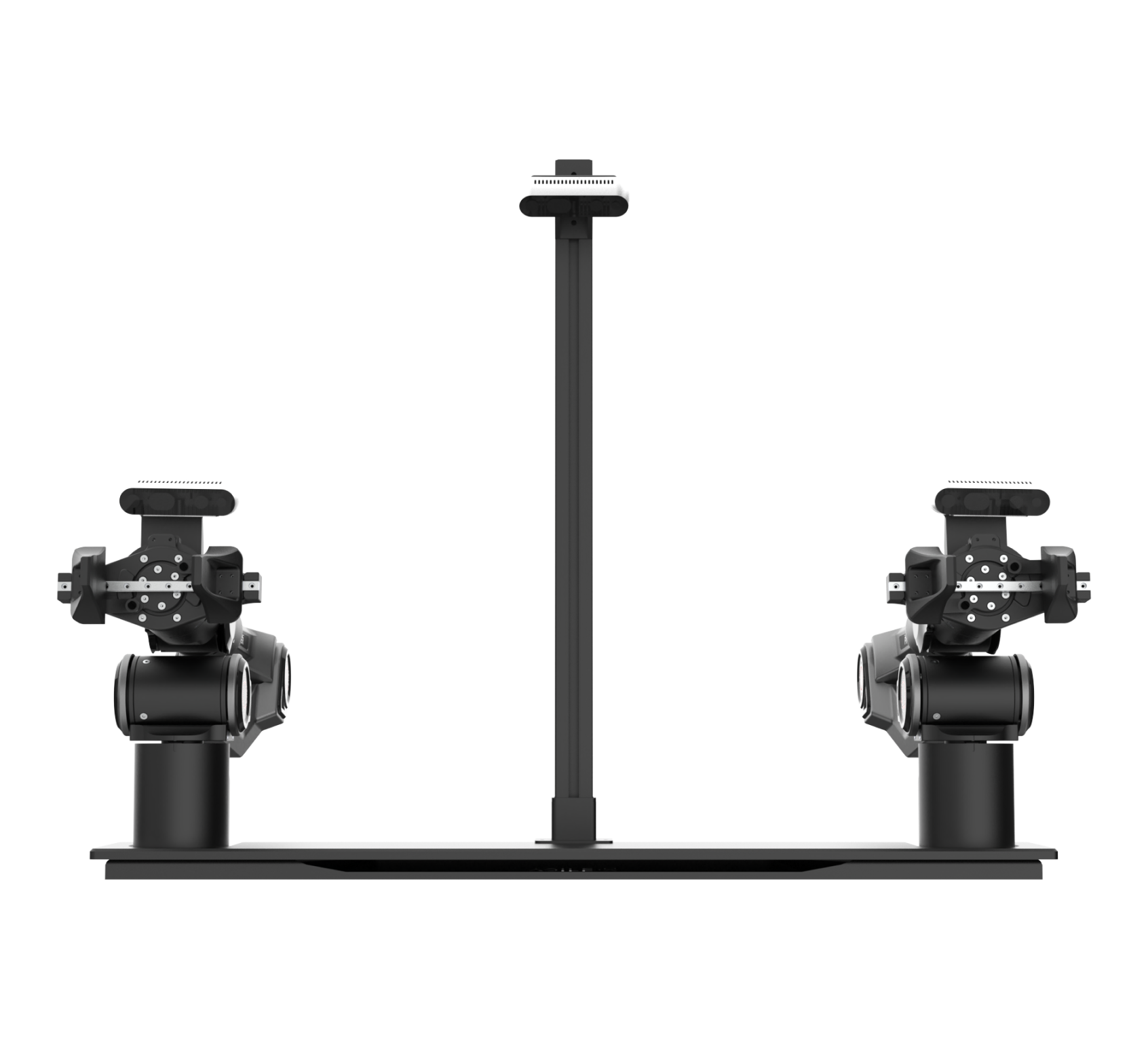
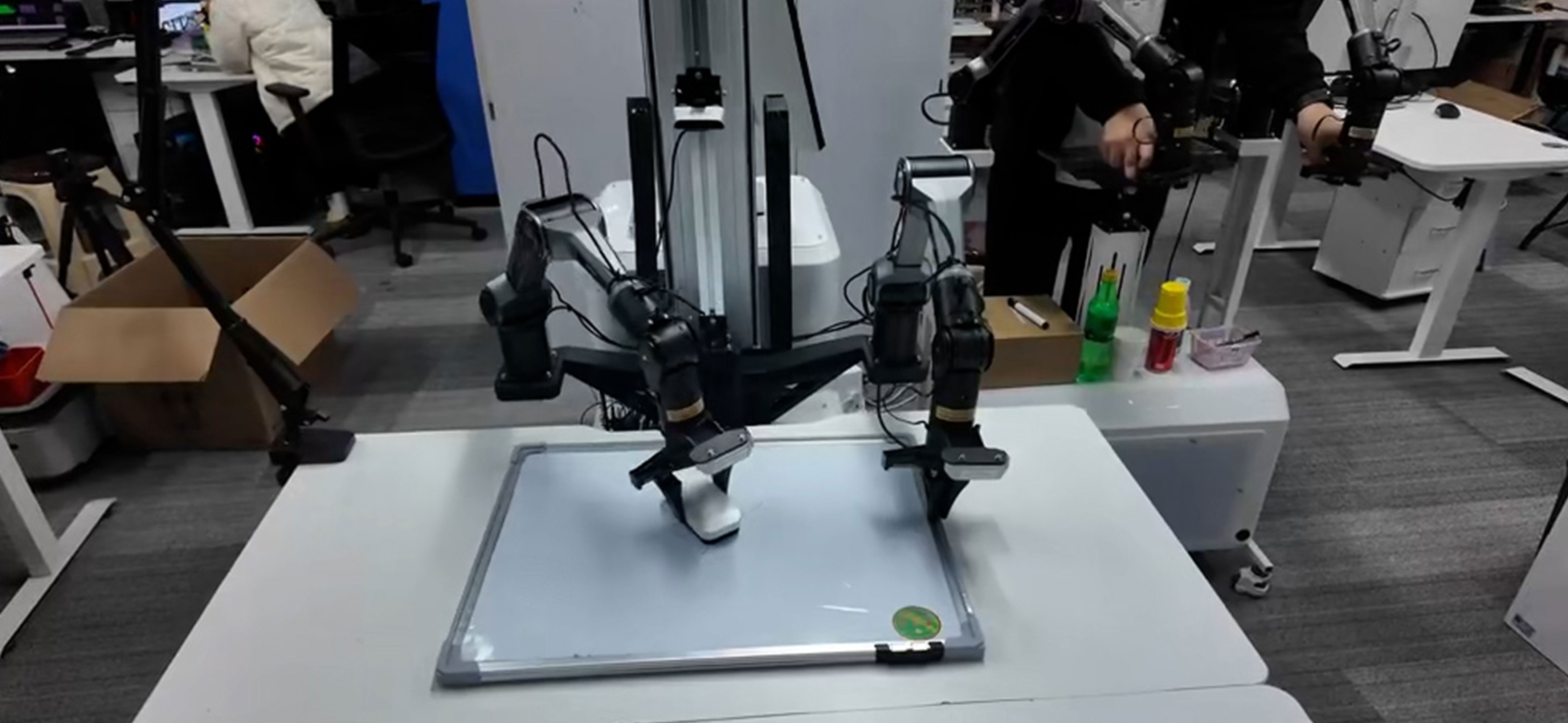
主从分离架构
创新的分体式遥操平台,通过2台示教器实现主从臂姿态精准映射,科研人员可远程操控从臂执行端,支持 Mobile ALOHA、ACT 等开源方案快速复现,帮助科研人员跳过基础开发环节,聚焦核心技术创新,显著降低具身科研项目的开发门槛。
主从分离架构
冗余续航,智能补能
针对长时间数据采集与不间断科研实验需求,产品采用户外移动电源 + 冗余电池设计,双重续航保障;搭配自动回充式充电桩,机器人可依托导航系统底盘自主规划路径至充电桩,完成智能补能,无需人工值守。
冗余续航,智能补能
规模化真实数采
无论是实验室可控环境下的算法验证,还是户外复杂场景中的数据采集,四驱四转底盘与可升降双臂的组合都能轻松适配;同时,支持与科研数据管理平台对接,可实现实验数据实时上传、分类存储与分析复盘,形成 “数据采集 - 处理 - 应用” 的科研闭环。
规模化真实数采
机器人感知与操作

双臂协作

科研教学
多模态数采

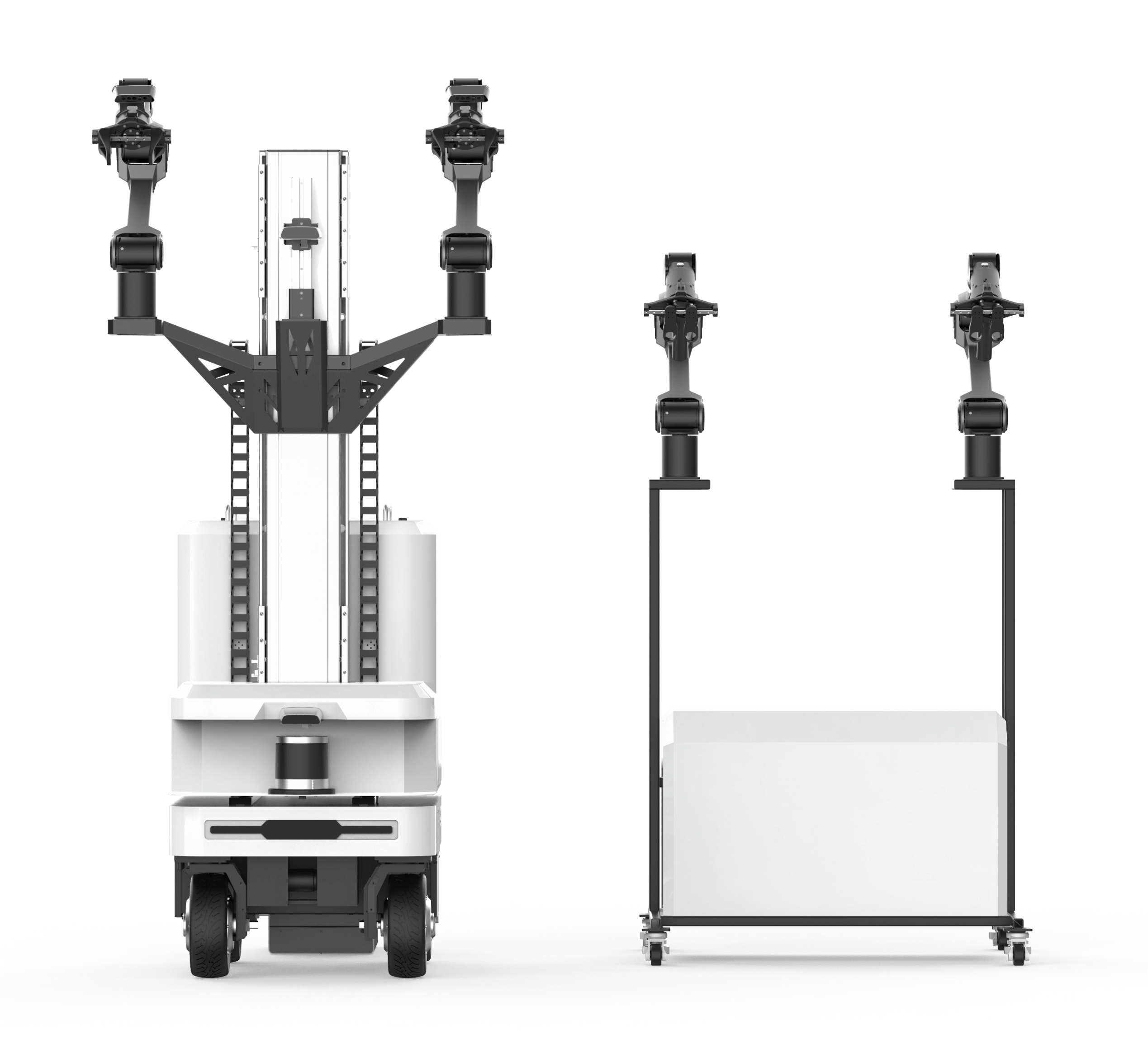
分体式ALOHA
分体式ALOHA
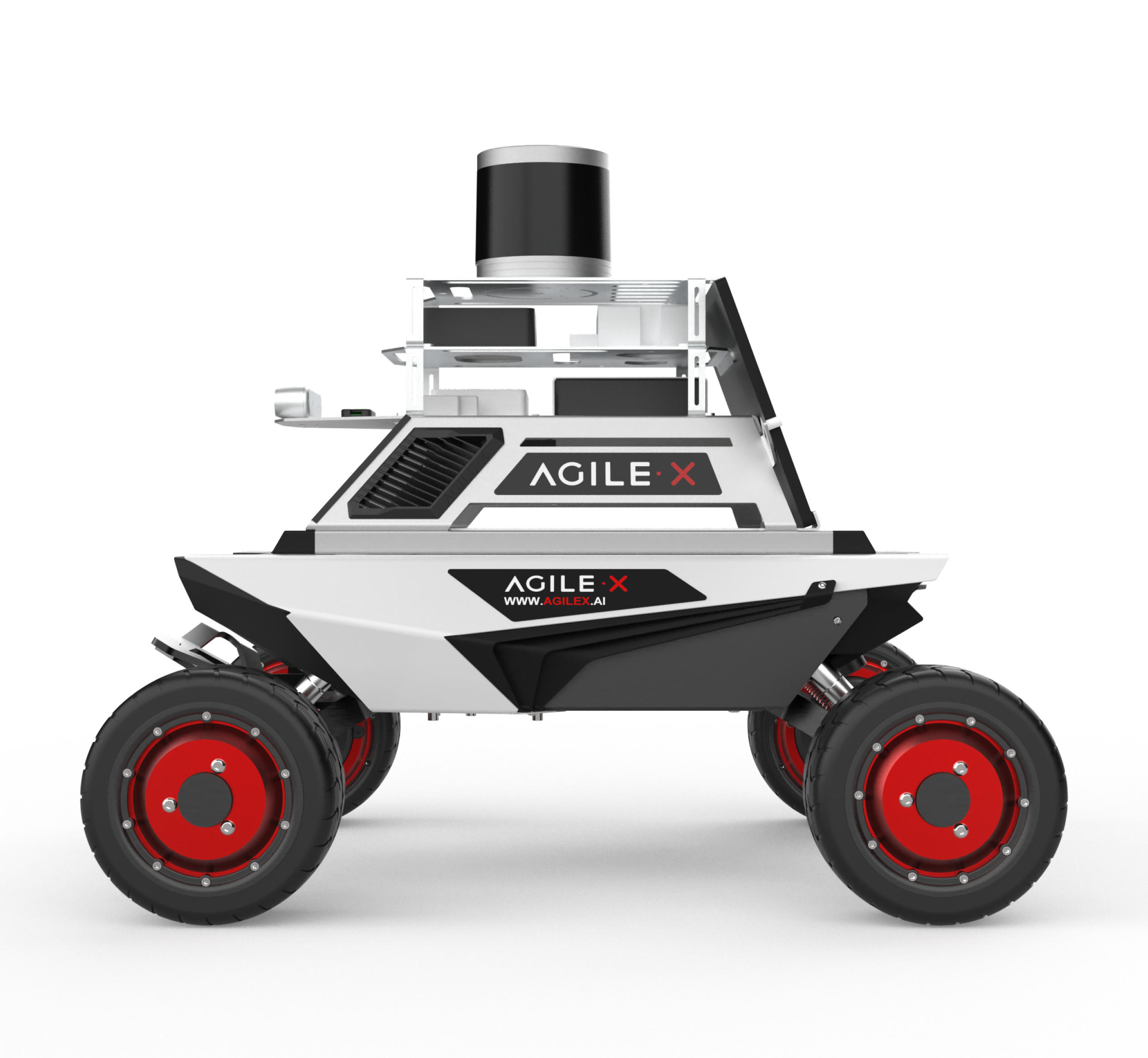
底盘参数(RANGE MINI 3.0)
尺寸
720*500*345mm
底盘负载
120kg
最高速度
2m/s
防护等级
IP54
工作环境
-20~45°C
续航
3h(满载)
6h(空载)
整机尺寸参数
最高高度
1891.6mm
最低高度
1322.4mm
双臂宽度
757.7mm
移动平台宽度
774.6mm

硬件规格
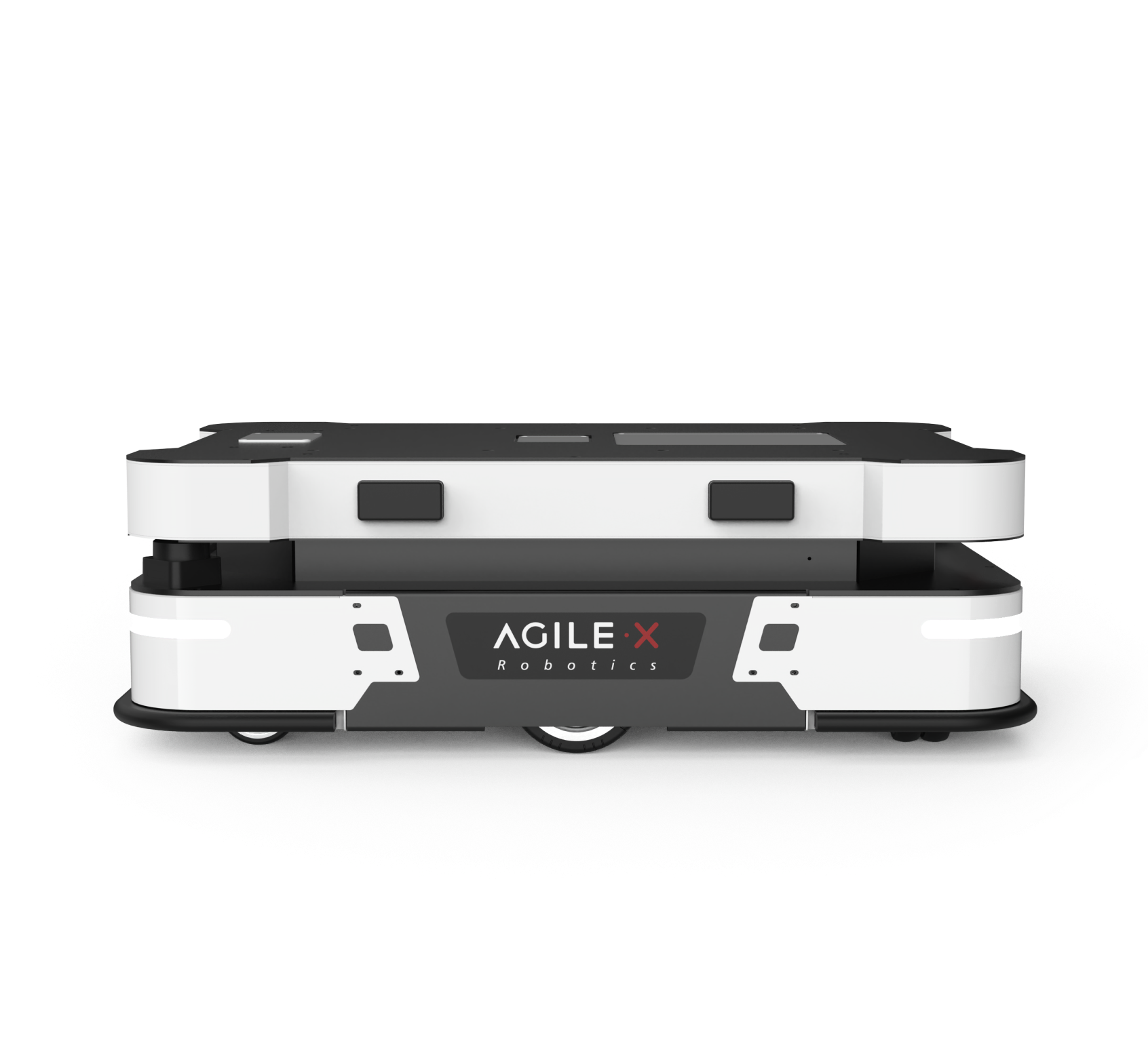
移动底盘
RANGER MINI 3.0
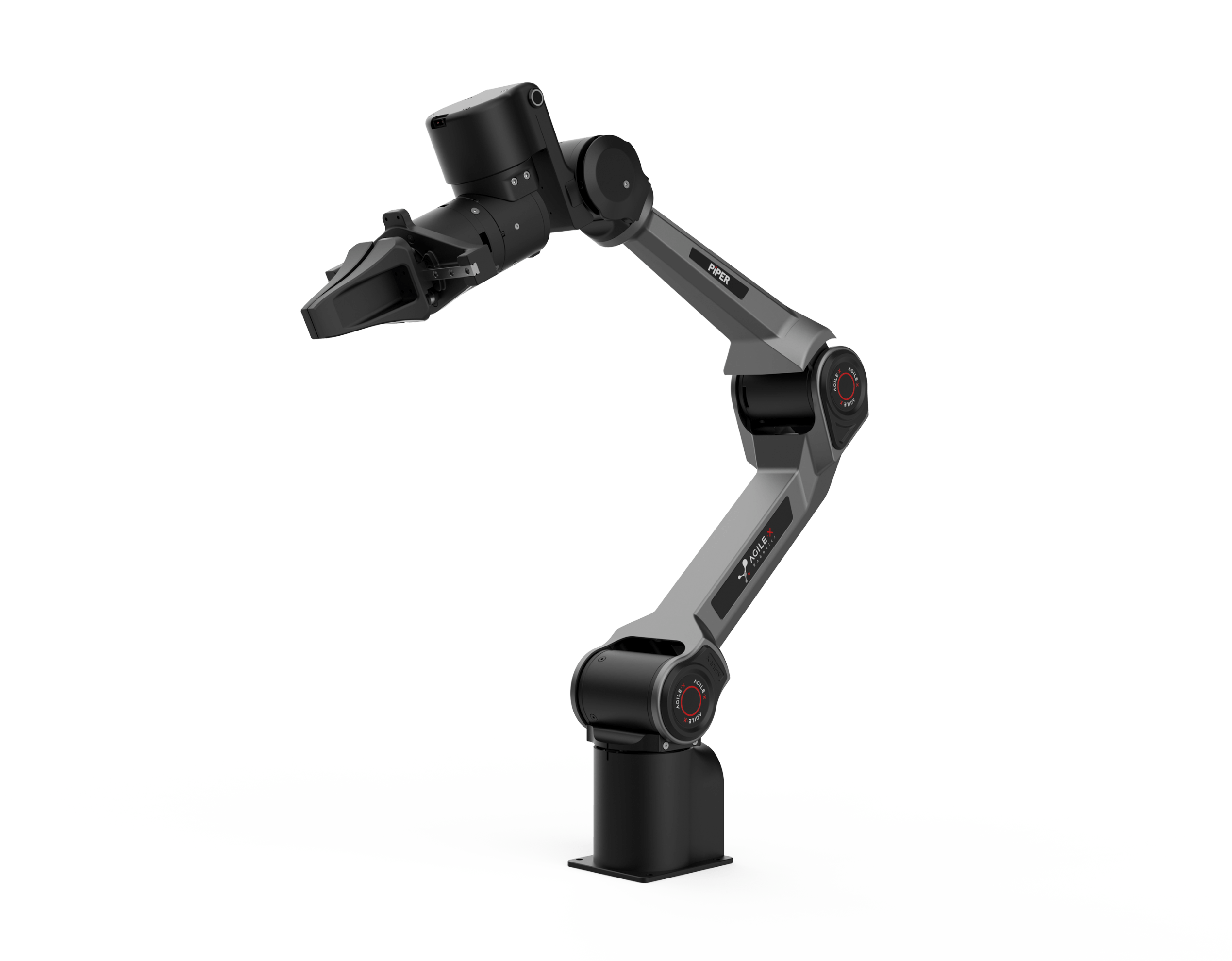
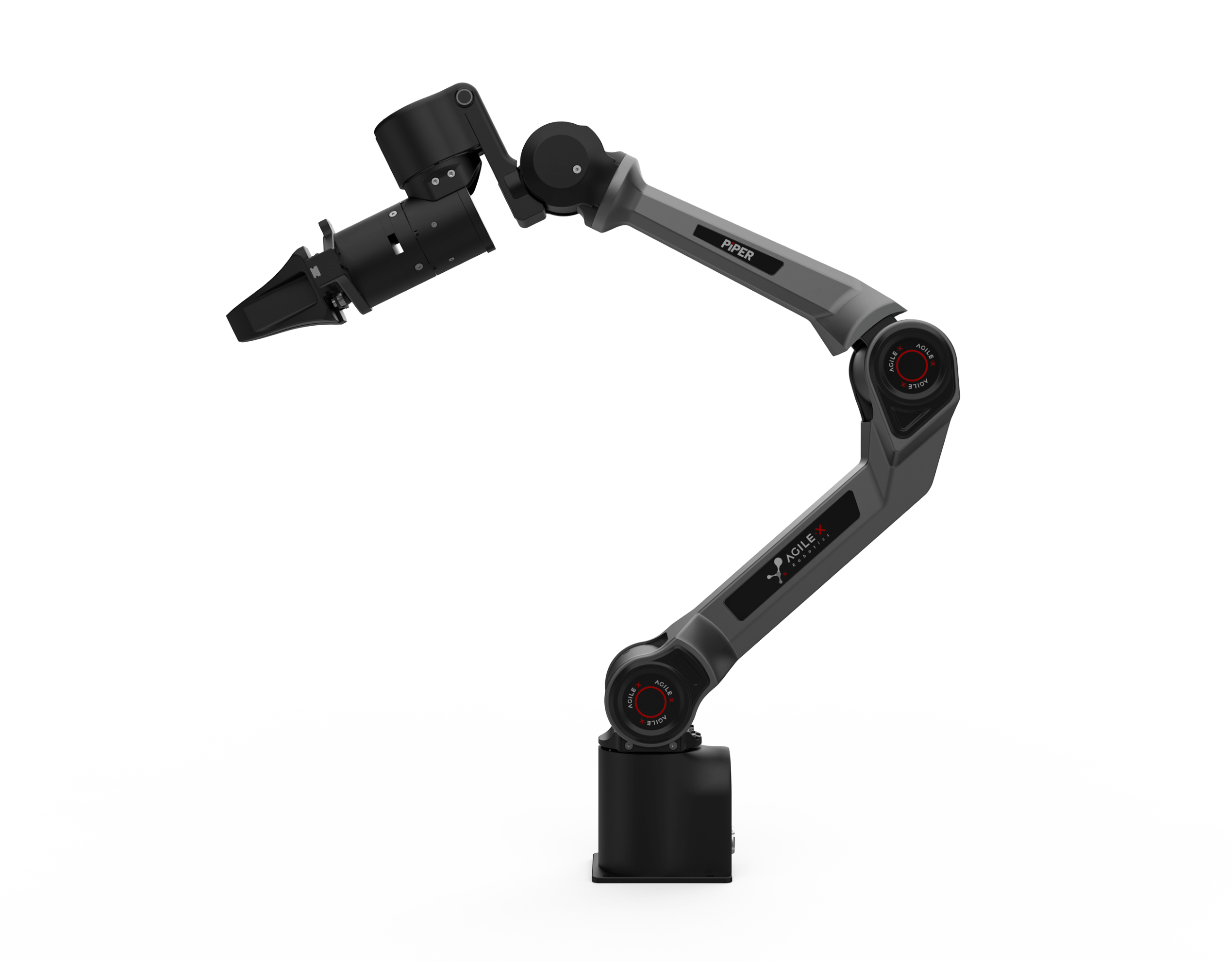
机械臂
PiPER*4
传感器
深度相机*3
激光雷达*1
计算单元
4060
交互控制台
11.6寸屏幕+logitech键盘
供电
户外移动电源
点击获取产品介绍单页